基于二维物体斜面黑线运动智能小车的设计

摘要:采用黑色胶布铺设在浅色纸张中心,作为小车运动时的模拟黑线跑道。在凌阳公司单片机SPCE061A的支持下,通过反射式光电传感器判断小车运动时的路面信息,经过算法处理,送出控制信号到小车电机,从而控制小车左转、右转、前进和后退,使小车能够准确跟踪黑线跑道,实现小车的简易智能化。
本文引用地址:https://www.eepw.com.cn/article/160583.htm关键词:SPCE061A单片机;电机;光电传感器;自控小车
二维物体斜面运动算法是2005年全国大学生索尼杯电子竞赛E题“悬挂运动控制系统”延伸出的研究课题,其主要内容是设计一个电机控制系统,控制物体在倾斜(仰角≤100°)的板上运动。在一个白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮吊绳控制一个物体在板上运动,并达到如下要求:
1)控制物体在80x100 cm的范围内做自行设定的运动;
2)控制物体作圆心可任意设定、直径为50 cm的圆周运动;
3)控制物体跟随板上标出的任意曲线运动,线宽1.5~1.8 cm,总长度约50 cm,颜色为黑色,曲线的前一部分是连续的,长约30 cm,后一部分是两段总长约20 cm的间断线段,间断距离不大于1 cm,沿连续曲线运动限定在200 s内完成,沿间断曲线运动限定在300 s内完成。
1 硬件电路设计
根据设计要求,系统可分为智能控制、传感器检测和电源3部分,整个系统示意图如图1所示。
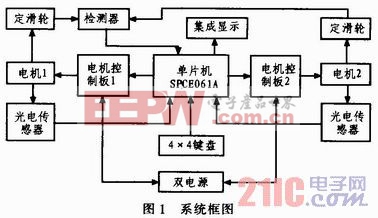
智能控制部分:系统中控制器件根据由光电传感器变换输出的电信号进行逻辑判断,控制悬挂系统的电机,显示数码管,完成了悬挂物体的自动寻迹,寻迹移动等各项任务。控制部分包括4个主要单元电路:单片机控制电路,左右电机驱动及控制电路,4x4按键输入电路,数码管动态显示电路。
传感器检测部分:系统利用光电传感器检测到的外部信息转化为可控制器件能识别的电信号,传感器检测部分主要用于轨迹探测电路。
电源部分:系统中采用自制的电源将220 V电压降至恒稳的12 V和5 V电压对单片机、电机、电机控制部分、显示数码管、键盘、计数器、光电传感器供电。
2 模块选择与电路设计
2.1 系统各模块的选择
1)单片机选择模块:选用凌阳SPCE061A单片机。
2)电机选择模块:选用齿轮减速同步电机。
3)电机控制模块:选用继电器和光电传感器组合控制电机。
4)显示模块:选用8位数码管LED。
5)输入模块:选用4×4的键盘。
6)信号检测模块:选用反射式红外传感器。
2.2 主要电路设计
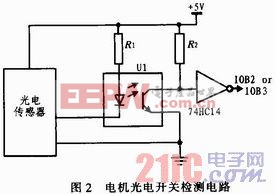
2.2.1 电机光电开关检测电路
利用电动机的正反转来带动控制物体运动,在该设计中采用在电机的转盘上安装一个60条黑白线均匀的圆盘,再用光电开关来检测,如图2所示。当要控制物体在画板上运动时,电机转动,光电传感器利用接收黑自电平时输出的高低电平,当光点传感器检测到黑色条纹时,输出高电平给单片机,相反当检测到白色条纹时,输出低电平,从而把连续输出高低电平转化为脉冲数,也就把电机转动时带动有黑白线的圆盘黑自条数转换成脉冲数,从而触发光耦U1或U2,经单片机IOB2或IOB3口输入信号来控制电机的转动,计算物体运动轨迹,从而控制物体的运动。








评论