基于自抗扰控制器的异步电机变频调速系统

摘要:设计了一种采用优化的自抗扰控制器(ADRC)的异步电机变频调速系统。应用扩张状态观测器的双通道补偿作用,统一观测系统的总扰动并加以补偿,使控制对象被近似线性化和确定性化。实验结果表明,相较于经典PID控制器,采用自抗扰控制的异步电机变频调速系统具有更高的动静态性能以及对负载扰动具有更好的鲁棒性。
本文引用地址:https://www.eepw.com.cn/article/160578.htm1 引言
随着电力电子技术、微电子技术和微处理器的不断发展,异步电机变频调速系统的调速性能得到了很大提升,与传统的直流电机调速系统相比,它具有结构简单、调速范围宽、效率高、特性好、运行平稳、安全可靠等特点,在生产实践中得到了广泛应用。变频器加异步电机构成的变频调速系统大有取代直流调速系统的发展趋势。
可编程逻辑控制器(PLC)被公认为现代工业自动化的3大支柱之一,其控制系统稳定可靠,通讯组网灵活,可方便集成到现场总线控制系统中,适应当前自动化程度日益提高的要求。PLC变频调速系统以其优越的性能得到了越来越多的重视,但对于多变量非线性强耦合的异步电动机,采用常规的定参数PID控制方法,对负载变化的适应能力差、抗干扰能力弱且受系统参数变化影响大。因此,在现有硬件设备的基础上,如何进一步提升变频调速系统的控制性能,是一个亟待解决的问题。
这里在异步电机变频调速系统中采用了自抗扰控制器方法,将系统的内扰、外扰等视为系统总扰动,由扩张状态观测器统一观测并加以补偿,使控制对象被近似线性化和确定性化,从而实现了系统的非线性控制,并通过实验验证了该控制方案的有效性。
2 异步电机变频调速系统数学模型
由电流跟踪型SPWM逆变器供电的异步电机变频调速系统在d,q两相旋转坐标系下的状态方程可用五阶非线性模型描述,当忽略变频器时滞时,系统模型可用降阶的二阶非线性模型描述:
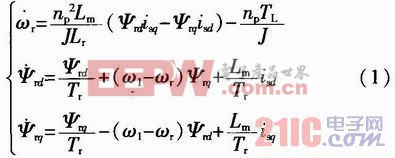
式中:ω1为电气同步角速度;ωr为转子速度;isd,isq分别为d,q轴的定子电流;ψrd,ψrq分别为d,g轴的转子磁链;np为极对数;Lm为互感;Lr为转子电感;J为转动惯量;Tr为电机转子时间常数;TL为负载转矩。
由文献可知,变频器在矢量运行模式下系统可逆,且整个系统可以简化为转速的单输入、单输出系统。
3 异步电机变频调速自抗扰控制系统
3.1 一阶自抗扰控制器的设计
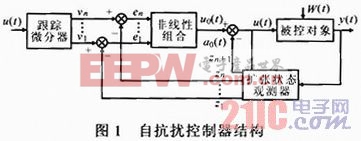
图1为自抗扰控制器结构图。该控制器是基于跟踪微分器(TD)来安排过渡过程、扩张状态观测器(ESO)来估计系统状态、模型和干扰,非线性误差反馈(NLSEF)来给定控制信号的一种非线性控制器。
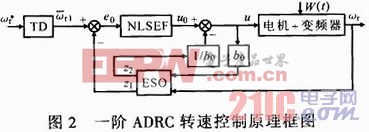
对于矢量控制的异步电机驱动系统,采用一阶模型控制器,相应采用二阶ESO结构。矢量控制中,一般保持转子磁链恒定,利用ADRC的特点,对于转动惯量变化引起的系统模型误差和负载扰动的影响等归于扩张状态z2统一观测并加以补偿。基于一阶ADRC的转速控制器原理框图如图2所示。
3.2 ADRC的优化
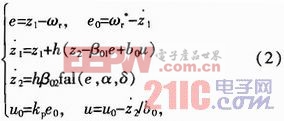
一阶ADRC结构中,ESO输出被控对象和未知扰动的观测值,没有被控对象的微分项输出,控制器无需跟踪微分器的输出,因此在ADRC结构中省略跟踪微分器环节。对于一阶对象,采用线性的比例调节代替NLSEF,可在保证控制器性能的前提下,有效地简化模型,减小计算量,从而得到结构优化的一阶ADRC模型。图3为结构优化的一阶ADRC转速控制框图。优化后的转速控制器的完整算法为:











评论