拟人机器人上肢多关节控制参数整定

摘要:为了得到拟人机器人上肢关节控制电机的精确参数,通过建立直流电机的物理和数学模型,利用Matlab软件建模和仿真,找到了一个合适的PID控制方法,通过调节KP,KI,KD参数,系统获得了较高的控制精度和响应速度,几乎能够完全抵抗外部干扰,该仿真对拟人机器人手部控制节点的设计具有很重要的指导作用,对于一般的直流电机闭环控制也有一定的借鉴意义。
本文引用地址:https://www.eepw.com.cn/article/160569.htm0 引言
拟人机器人手部控制节点的任务是接收机器人“大脑”(即上位机)的指令,完成手部电机的速度及位置控制。拟人机器人手部电机采用DC电机,通常DC电机抗干扰能力有限。本文探索DC电机的PID闭环控制手段,为了得到较好的可能效果,需要寻找合适的控制参数:KP,KI,KD。文中首先对DC电机进行物理抽象,进而建立数学模型,并通过实验手段得到实际电机的系统参数。最后通过模拟手段,实现拟人机器人手部电机开环控制系统及速度闭环PID控制系统的仿真,并通过调节KP,KI,KD获得较好的抗干扰相应。通过仿真得到的控制参数可以反过来用于指导控制节点的设计。
1 DC电机建模
1.1 建立直流电机的物理模型
电机的物理模型如图1所示。
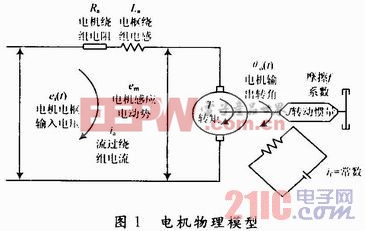
1.2 DC电机数学模型的建立
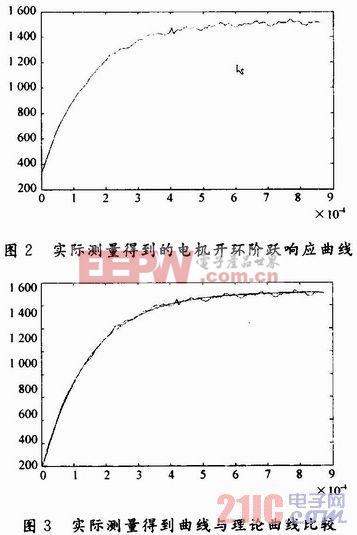
式(1)是理论分析得到的电机开环控制的数学模型。判断一个模型是否适用于实际的拟人机器人手部DC电机,需要将实际测量电机的相应曲线和理论公式进行比较。
![]()
1.3 实际电机的开环阶跃响应
为了确定上述电机模型的参数,同时验证上述电机模型的正确性,首先对电机进行开环阶跃响应实验,给定电机一个目标速度设定,测出电机速度随时间的变化曲线。拟人机器人手部电机装有16线编码盘,给电机加上128/256的PWM站空比(相当于2.5 V电压,PWM站空比与e1成线性关系),利用单片机的寄存器,通过编写一定的程序测得一组电机每转过π/8对应的时间值,为了处理实际测量得到的数据,使用VC编写一个数据处理程序,在Matlab中运行由VC程序自动生成的.m文件,就可以绘出拟人机器人手部DC电机的响应曲线。在Matlab中运行该文件就可以得到电机的响应曲线,如图2所示。










评论