基于ATmega32的遥控采摘机器人设计

摘要:针对机器视觉采摘机器存在的技术不成熟,成本过高等不足,提出采用人工操控的半自动采摘技术,并进行了探索研究。设计了一款模拟采摘机器人,机器人以履带底盘为基座,三自由度机械臂,红外遥控操作。硬件电路以ATmega32为系统控制核心,采摘机器人的动作采用BL35P12为核心红外遥控控制。系统软件基于AVR Studio4开发环境,实现对机械臂运动的全方位精确控制。采摘机器人采用模块化设计,抓取速度快,成本低,易于实现,可扩展性强。
关键词:采摘机器人;三自由度;ATmega32;红外遥控
目前采摘机器人研究重点大多集中在视觉系统对果实目标的识别和定位上,利用摄像头获取果实图片信息,通过复杂的图像信号处理算法,编制程序进行逻辑处理,实现果实判断,发出采摘命令。这种方式机器人具有较好的自动识别的能力,并且能够自动采摘,无需人工操作,是农业机器人最理想的方式,但目前相关技术不够成熟,投入较高。本设计采用人机协作方式,即采用人工判别果实,机器人负责摘取。通过人工现场观察判断,使用无线遥控远程控制机器人动作。这种方式现有技术比较成熟,使得机器人研发周期缩短,造价成本低,虽然不能够完全代替人劳动,但能够降低人的劳动强度,对于目前中国农业的水平,能够更好的普及。
针对以上存在的问题,本文设计了一款基于ATmega32的模拟采摘机器人,能实现人工操作的机械采摘,通过红外遥控控制机械臂使末端夹持器伸到目标果实所在位置,进行抓取工作,完成采摘任务。
1 机器人总体方案设计
机器人设计融合了机械制造技术,电子电路技术,自动控制和传感器检测技术,以及软件开发编程等。本文中机器人的传感器和红外遥控器的信号输人到主控制板,主控制板处理后输出控制三自由度机械臂和履带底盘结构的机器人,红外遥控机械臂,实现抓取果实。机器人结构框图如图1所示。
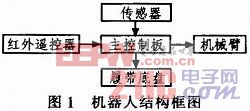
机器人的控制模式为无线控制机器人采用直接操纵方式,操纵者通过遥控器向远端发送操纵指令。控制机器人的车体的前向运动,左右转向,三自由度的机械臂的运动,及夹持器旋转、张与合。文中设计的机器人具有结构简单,功能丰富,可扩展性强等特点。
2 机械装置设计
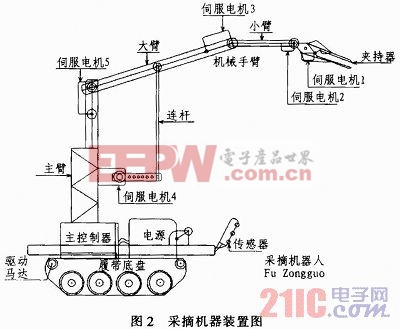
遥控采摘机器人机械装置图如图2所示,主要包括两部分:两自由度的移动载体和三自由度带夹持器的机械臂。机器人主体使用网孔铝板材料和工程塑料组装成机器人机体,结构轻巧,方便在车体上增加模块。移动载体为履带式底盘,加装了主控电路板、采摘辅助装置、多种传感器、电源模块等。履带底盘每一侧采用双履带结构,使用4台FAULHABER电机驱动。机械臂固定在履带式行走机构上,机械臂上的伺服电机使用扭矩10 kg/cm的MG995金属齿轮舵机,机械臂上伺服电机1控制夹持器的张开和合并,使得夹持器能够完成采摘和剪切等任务。伺服电机2控制夹持器的左右旋转。伺服电机3控制小臂上下运动,伺服电机4通过连杆和伺服电机5联合驱动大臂上下运动。









评论