基于C8051F的果树施药控制系统设计

摘要:为了提高果园施药的作业效率和农药使用率,介绍了一种参数可调的施药机构及其控制系统。本系统基于SILICON公司C8051F020和C8051F340单片机作为微处理器,采用主从通讯方式,通过实验室模拟调试和现场调试,实现了对执行机构和喷雾参数的有效控制。
关键词:控制系统;C8051F;执行机构;喷雾参数
水果种植业是我国农业发展的重要组成部分,果树病虫害防治作业也越来越被重视。当下我国施药水平总体偏低,主要表现在自动化技术落后、作业强度大、农药浪费严重等问题。为了解决这一现象,提高果树施药喷雾效率和农药附着率,文中设计了新型喷雾机构及其控制系统,该机构能够针对不同果树尺寸来调节喷雾距离。作业人员可以远距离操作手持式控制器即可调节喷雾参数(包括每侧喷雾头的开闭、喷雾机构伸缩长度、轴流风机送风转速等),这在很大程度上降低了劳动强度,提高了施药效果。
1 系统工作原理
本系统结合了机械和电子技术,由机械部分和控制部分构成。施药喷雾过程中喷雾头与冠层的距离要求适中,而果园内的果树形状尺寸各异,因此应用了电动推杆作为执行元件安装于机械系统中;为了增加喷雾头的射程、提高雾化效果,采用风送式喷雾,将多个喷雾头置于由轴流风机驱动的转叶风扇表面;为了调节风机转速,选用了变频调速器来适应不同冠层密度的果树;为了增加作业效率,机械部分采用
两侧对称的形式,可以同时对两行果树实施作业;为了操作可靠方便,系统中所有的参数值(喷雾头的开闭、机构伸缩长度、轴流风机送风转速、喷雾时间等)都由手持遥控器通过上位机与下位机之间的无线通讯来设定。
针对上述作业工况和技术要求,设计了施药机构运动简图如图1所示。整个机构固定于拖车尾部底盘上,由机动车牵引该喷雾机构在田间作业,而果树位于每侧喷雾架之中。
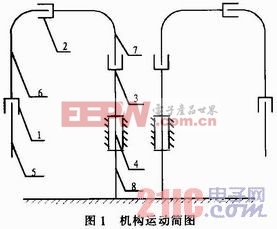
在图1中,机构左右两侧空间上完全对称,每侧各有3个移动副和1个转动副。单侧安装有4个轴流风机和雾化盘,安装位置分别位于5、6、7、8处,每个雾化盘上设置有若干个喷雾头,机车行进时打开喷雾头和轴流风机即可实现立体喷雾。针对不同树高,可以通过调节移动副1配合移动副3来保持喷雾头与树冠的距离;而调节移动副2则可以在宽度方向调节喷雾架跨度。转动副4能够实现每侧机构绕其内侧竖直轴转动,当系统停止工作时通过转动副4收起喷雾架,来减小机器的空间尺寸。移动副通过仿形电动执行器来实现。执行器实为一步进电机驱动的丝杆螺母机构,电机旋转运动转变为推杆的轴向运动。控制步进电机的正反转和运行步数即可调节执行器的伸缩量。
2 控制系统硬件设计
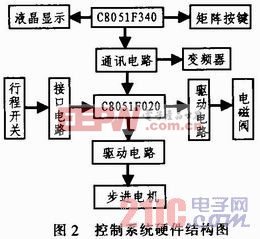
根据喷雾作业要求,电控系统需要具备以下功能:驱动电动执行器内步进电机的正反转,并且推杆能够按照设定值执行伸缩;驱动液流电磁阀的通断;通过操作变频器调节轴流风机的送风速度;可以设定喷雾时间;能够采用无线通讯方式通过手柄按键远程作业,包括与变频器的通讯。分析上述控制对象,拟定控制方法,并设计实用的人机界面,得出如图2所示的控制系统硬件结构图。













评论