单兵作战用机器人控制系统设计
1.3 串 口
TMS320F2812的GPIOF4、GPIOF5配置成串口1,GPIOG4、GPIOG5配置成串口2。串口1接收GPS的信息,用来确定当前机器人的位置信息;串口2连接机器人电台,实现与遥操控终端电台的无线传输。机器人电台连接摄像头和麦克之后,能够把影音信息传送到遥操控终端的电台,遥操控终端的工作人员即可接收到机器人附近的视频、音频信息。
1.4 电机控制
机器人的前进、后退、左转、右转由左履带电机和右履带电机控制。机器人上的武器通过做上下、左右调节来瞄准目标。
DSP的XINTF是其外部接口,这里使用了XD0-XD11共12根数据线,经过电平转换为5 V电平后,连接到D/A转换芯片。D/A转换芯片选用了12位的AD664,可输出4路0~5V模拟电压,4路模拟电压作为控制电压输入到电机控制器,分别控制机器人左履带电机、右履带电机、武器上下调节电机、武器左右调节电机。
当电压为2.5 V时,电机停转;电压小于2.5 V时,电机反转;电压大于2.5 V时,电机正转。对于左履带和右履带,通过输出的控制电压,可实现车体前进、后退的无级变速,以及左、右转弯的运动控制。
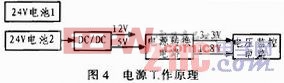
1.5 电源供电电路
锂电池具有体积小、重量轻、容量大的特点。机器人内置2组24 V供电电池。第1组24 V电池为左履带电机、右履带电机、武器上下调节电机、武器左右调节电机供电。第2组24 V电池经过DC/DC模块.转换成12 V电压和5 V电压。12 V电压用来给机器人上的无线电台供电。5 V电压为控制电路供电,同时经过电源转换电路,转换成3.3 V和1.8 V电压为DSP供电。为了监测DSP芯片供电电压是否正常,增加了电压监控电路,当DSP芯片供电不正常时,可将此故障报送到电台发送到遥操控终端。本文引用地址:http://www.eepw.com.cn/article/160068.htm
2 单兵作战用机器人控制系统软件设计
单兵作战用机器人控制系统软件分为主程序和中断服务程序两部分。主程序实现的流程如图5所示,上电初始化处理器的I/O端口、A /D端口、串口等资源,初始化完毕开始与遥操控终端软件进行通信,握手成功后,开启软件定时器、中断,定时采集机器人信息,包括超声波避障、电量测量值、GPS信息。












评论