单兵作战用机器人控制系统设计
TMS320F2812包括4M可寻址程序空间和4M可寻址数据空间。同时片内具有128×16位的FLASH存储器和18K×16位的SRAM。TMS320F2812采用3_3 V和1.8 V供电,功耗低。TMS320F28 12的外部接口非常丰富,16路12位的ADC采集通道,SPI、SCI通信模块,多达56个复用I/O引脚。
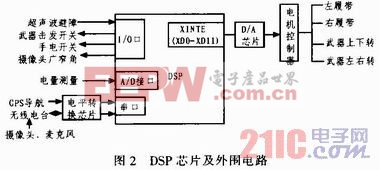
单兵作战用机器人控制系统组成如图2所示。
1.1 I/O端口
TMS320F2812的GPIOA0-GPIOA3口设置成基本输入输出端口,端口配置及属性如表1所示。
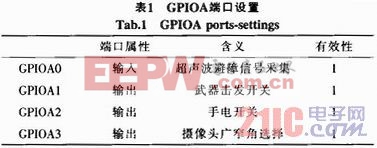
超声波避障信号用于探测机器人前方0.5 m内是否有障碍物,如遇到障碍物,机器人可自动转弯避开。武器击发开关用于机器人上武器的击发控制,手电开关用于机器人上手电的开关控制,摄像头广窄角选择用于机器人上摄像头的广角与窄角的切换。
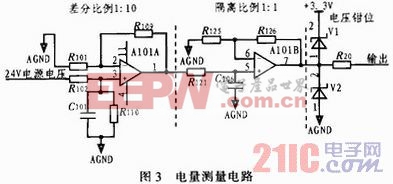
1.2 A/D端口
TMS320F2812的A/D转换器模块共有16个通道,模拟电压的输入范围是0~3 V。这里用了其中的2个通道,分别用来测量机器人上的2块24 V锂电池的电量。图3中电量测量电路分为3个部分:差分比例1:10电路,把24 V电压转换到0~2.4 V区间;隔离比例1:1电路,能有效的隔离输入电压与DSP的前端接口;电压钳位电路,将输入到DSP端口的电压钳位在3.3 V以内,防止电源电压意外浪涌时损坏DSP的A/D转换端口。2路24 V电池电压分别经过2路电量测量电路后,输入到DSP的ADCINA0、ADCINA2两个端口,根据采集到的电压值,可计算当前电池的电压,从而确定电池电量。











评论