基于DSP2812的运动控制平台
在大二的时候我加入到了学院的创新实验室,加入实验室后每天都很努力,怕学习不好表现不好会被导师赶出去,每天早上7点签到,然后就开始学习英语,如果有课就在8点去上课,没课就开始学习相关专业课;晚上必须在实验室待到10点以后才能回寝室,每个假期只能回家一周多,所以从大二开始我就没有了寒暑假,这些都是导师的要求,也是工作室每个成员必须做到的。大二导师主要抓模数电和单片机,记得曾经做过OCL模拟功放,数字功放,电源等一些模拟类设计,并以音质和效率进行评比;用单片机做过一些多功能数字钟,红外解码等一些作品,数字钟以运行一天谁的误差最小来评比。
本文引用地址:http://www.eepw.com.cn/article/159313.htm到了大三,我们每个人根据自己的兴趣爱好选择了自己的方向,我们实验室一直以来都是以FPGA为主打方向的,很多人选择了FPGA,而我却选择了DSP,实验室师兄做DSP的也几乎没有,我就成立孤军奋战。接下来凑了1000元买了开发板,开始接触DSP,刚开始的入门真的遇到了很多的问题,总是踏不进那个门槛,一个人的钻研会浪费更多的时间,但每个问题让人记忆犹新,如今论坛上很多刚接触DSP的网友遇到的问题也就是当初我遇到过的。
基本熟悉了DSP2812后我做的第一个设计就是2011年中国机器人大赛项目中的机器人游中国小车,整个车体的硬件单路都是我们自己设计,画PCB并用学院的PCB刻板机花一夜的时间做出来,焊接调试,可能是由于设计的不合理和保护做的不是很好,烧坏过2块核心板;第二个设计就是我要快乐分享的运动控制平台的设计,下面就是我的设计:
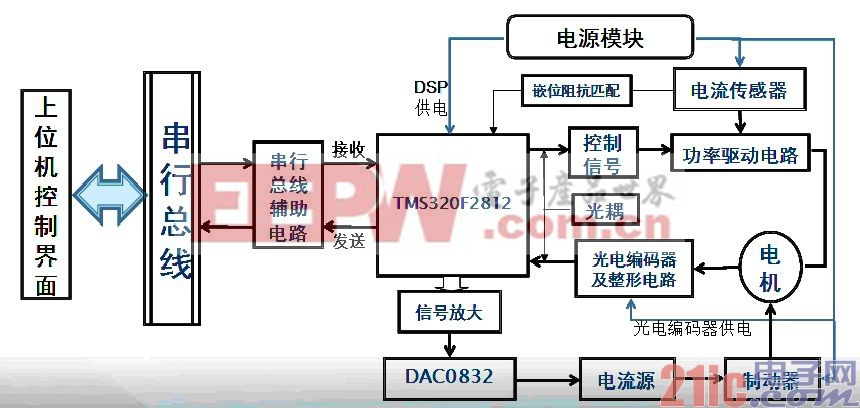
设计以TMS320F2812为控制器,结合其控制方便、处理速度快等特点,运用PID算法进行速度环调节,500线光电编码器进行速度的反馈,变M/T法进行速度的精确采集,霍尔电流传感器进行电流的采集和继电器确保过流的断电保护,可控恒流源控制负载大小,VB6.0可视化控制界面的编写,设计了兼有PWM和模拟量控制的直流无刷电动机闭环在线调试系统,给出了该系统的功能、硬件结构和软件设计方法。系统中的主要控制对象是直流无刷电机,还有磁粉制动器作为电机的模拟负载,下面简单介绍一下直流无刷电机和磁粉制动器:
直流无刷电机利用电子换向器取代了机械电刷和机械换向器,因此使这种电机不仅保留了直流电机的优点,而且又具有交流电机的结果简单、运行可靠、维护方便等优点,使它一出现就以极快的速度发展和普及,广泛应用于航空航天,精密仪器,现代家电等领域。磁粉制动器是根据电磁原理和利用磁粉传递转矩的。磁粉制动器具有激磁电流和传递转矩基本成线性关系,作为电机的模拟负载,在调试闭环参数时可以通过调节恒流源的电流大小去控制负载的大小,从而找出最佳闭环系数。
在整个运动控制平台硬件系统中,系统供电电路主要有DCDC模块构成,负责给各个电路模块提供工作电源,其输出电压有±15V,+12V,+5V,+3.3V。信号调理电路完成对各种传感器及采集回来的信号处理,主要包括霍尔电流传感器的模拟量信号、光电编码器的转速信号、给定控制开关量信号等,经调理电路后,使其各种信号的电平和幅值满足DSP控制器的要求;DSP主控电路以TMS320F2812为核心处理器,完成对各种信号的处理以及系统的闭环控制,并通过SCI接口实现控制器与上位机的通讯;恒流源为磁粉制动器提供电流,以便输出与电流成线性关系的扭矩。下面是我画的大体框图:其中2812核心板原理图、PCB、BOM表和Gerber都已经分享到了论坛版块 http://bbs.21ic.com/icview-583101-1-1.html
电机驱动器是由分立元器件H桥搭起来的,没有采用半桥驱动芯片如IR2101等芯片,使用三极管搭建的并有一定的硬件死区作用;我觉得做H桥驱动器最重要的就是上桥臂的浮动导通,这一点一定要做好,在电机驱动中,由于电流较大,上管都采用N型MOSFET。由于每个上管源极的电压是浮动的,因此上管的栅极驱动电压也必须浮置在源极的电压之上才能有效地开启上管。实现这种的方法有多种,如自举法、隔离电压法、脉冲变压器法、电荷泵法、载法驱动法等多种方法。本次设计采用电荷泵法来实现电压的浮动,主要电路如下如所示:
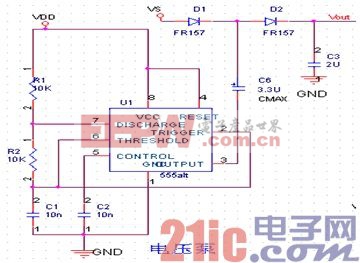
电荷泵的基本原理是通过电容对电荷的积累效应而产生高压,使电流由低电势流向高电势。随着集成电路的不断发展,基于低功耗,低成本的考虑,电荷泵在电路设计中的应用越来越广泛。由于H桥由4个N沟道功率MOSFET组成,如要控制各个MOSFET,各MOSFET的门极电压必须足够高于栅极电压。通常要使MOSFET完全可靠导通,其门极电压一般在10V以上,即Vgs>10V,对于H桥下桥臂,直接加10V以上的电压即可使其导通;而对于上桥臂,驱动电路必须能提供高于电源电压的电压,这就要求驱动电路中增设升压电路,提供高于栅极的电压。考虑到Vgs有上限要求,一般MOSFET导通时Vgs为10V~15V,也就是控制门极电压随栅极电压的变化而变化,即浮动栅驱动。因此在驱动控制电路中设计电荷泵电路,用于提供高于驱动电源电压的电压。
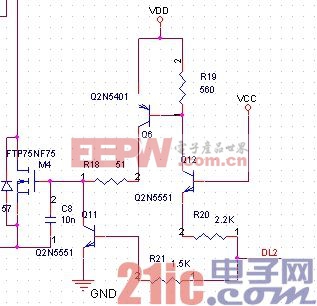
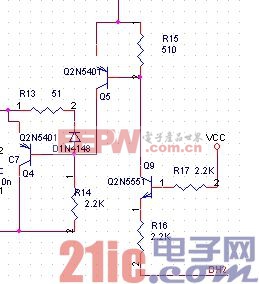
最近看到电动车驱动器上为了扩大电流,在H桥上使用的75NF75上又并联了一个,这样电流会更大,可靠性也更高,值得借鉴。下上桥驱动电路如下图所示:

















评论