基于DSP2812的运动控制平台
H桥上MOSFET的漏源极接的4个二极管起到保护MOSFET的作用,当电机停止运转的瞬间,电机中储存的能量会加到H桥上,这样可以通过二极管引导到电源上去,防止了MOSFET被击穿的情况。当然,我们也可以采用吸收电路来吸收开关关断浪涌电压和续流二极管反向恢复浪涌电压,通常有典型的三种吸收电路,分别是RC、RCD、C,三种吸收电路的特点和适用范围如下表所示:
电路类型 | RC型吸收电路 | RCD型吸收电路 | C吸收电路 |
特点 | 结构简单,易造成过冲电压,会引起集电极电流升高 | 克服过冲电压过高,过电压抑制效果较好会引起集电极电流升高 | 电路简单,成本低,易产生震荡,会引起集电极电流升高 |
适用范围 | 小容量,低频装置 | 小冲量,低频装置 | 中等容量装置 |
为了使驱动器使用更加方便,可以在H桥电路之前加入逻辑电路方便控制,具体电路和说明如下:
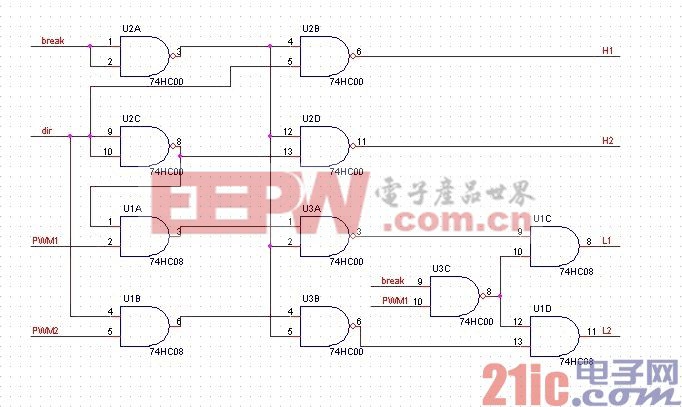
说明:(1)D1H与D1L为左桥臂的上下控制信号,D2H与D2L为右桥臂的上下控制信号。
(2)Brake为高电平时表示刹车,D1H,D1L,D2H,D2L全为高电平。
(3)Dir表示方向信号,即Dir为高电平正转,则Dir为低电平反转,但前提是Brake为低电平。
(4)PWM1和PWM2表示分别控制正转和反转,通过占空比来控制电机转速。
(5)驱动优点:在刹车的时候通过PWM1短路电机,这样在由正、反转变换时不会出现抖动。
上面逻辑电路的真值表如下所示:
Brake | Dir | PWM1 | PWM2 | D1H | D2H | D1L | D2L | |
1 | × | PWM1 | PWM2 | 1 | 1 | PWM1 | PWM2 | 刹车 |
0 | 1 | PWM1 | PWM2 | 0 | 1 | 1 | PWM1 | 正转 |
0 | 0 | PWM1 | PWM2 | 1 | 0 | PWM2 | 1 | 反转 |
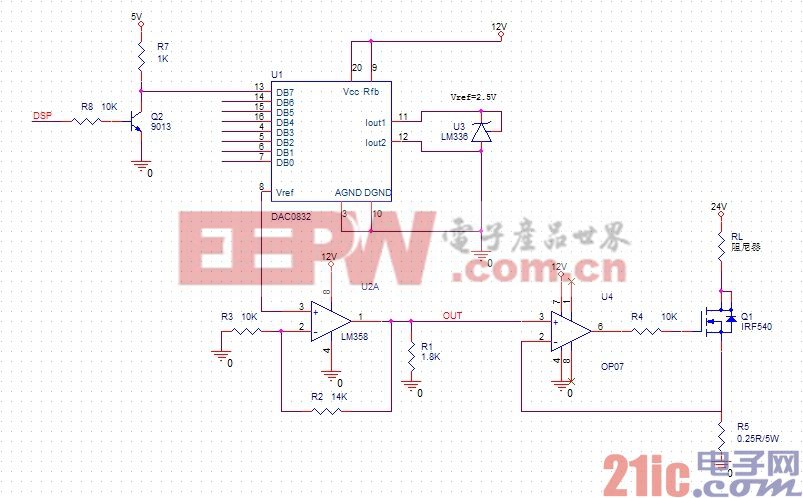
这里再简单介绍一下它的工作原理:由于DSP输出的控制信号为3.3V,为了能使DAC0832正常工作,需要将DSP输出的控制信号放大为5V,这个过程是有图中三极管Q2通过上拉完成的,电路也存在不足,因为通过此电路就会将DSP输出的控制信号取反,这会给程序编写带来不便。
DAC0832的参考电压是由LM336-2.5V提供的,这样DAC0832转换过程中的参考电压Vref=2.5V,输出电压通过运算放大器LM358之后,就有如下的关系式(期中D表示DSP输出的控制数字量):
Vout = +2.5VDC (1 + R2/R3)(D/256)
电路中调征管采用大功率场效应管IRF540。采用场效应管,更易于实现电压线性控制电流,既能满足输出大电流的要求,也能较好地实现电压近似线性地控制电流。因为当场效应管工作于饱和区时,漏电流Id近似为电压Ugs控制的电流。即当Ud为常数时,满足:Id=f(Ugs),只要Ugs不变,Id就不变。

















评论