CAN总线在地面变电所模拟盘中的应用

4 模拟盘控制器的软件设计
4.1 模拟盘控制器主程序设计
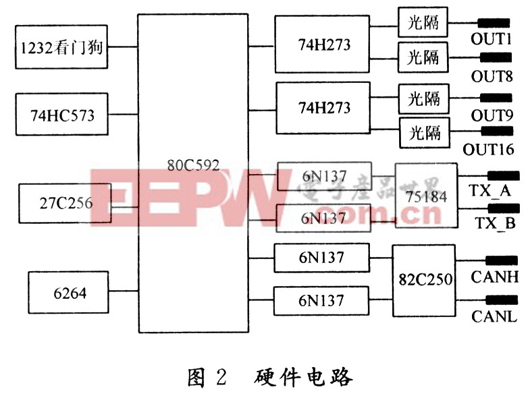
在电力监控系统中,每个监控器监控一个开关状态,监控器通过CAN总线与模拟盘控制器相连,模拟盘控制器自身携带16个指示灯,并通过RS 485通讯卡与一个数字表头相连(见图1)。16个指示灯与监控器监控的16个开关状态相映射,通过指示灯不同状态来折射开关量的状态:本文定义了指示灯显示的3种状态:红色、红快闪、红慢闪。其中指示灯为红色代表开关为正常的工作状态;指示灯为红快闪,表示开关为事故跳闸一――报警状态;指示灯红慢闪为巡检状态;数字表头则用来显示监控器采集到的模拟量值。在模拟盘控制器的软件设计中,通过定时器来操作指示灯的闪烁快慢,根据模拟盘通信协议对P4口各端口进行相应的置位、复位,实现指示灯的现实操作。本文引用地址:https://www.eepw.com.cn/article/158116.htm
4.1.1 初始化
初始化包括:有关的RAM单元清零、定时中断初始化、CAN总线初始化、RS 485通讯初始化。
在中断初始化时,要注意对中断允许寄存器IEN0、IENl的置位,尤其是IEN0.7总允许/禁止中断控制的置位;通过对中断优先级特出功能寄存器IP0,IPl来设定各中断源的优先级。
4.1.2 巡检操作
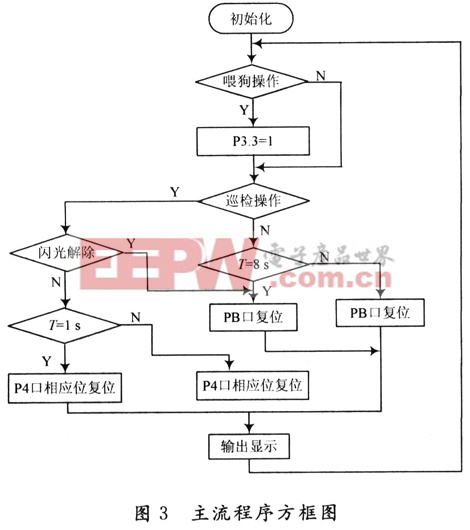
实际操作系统中,设备常时间运行会出现老化、反映不灵敏的情况。为了防止模拟盘控制器硬件电路以及指示灯本身的故障而导致显示状态不能紧跟开关状态变化,本文设计了巡检操作,由P8XC592单片机的P1.0来控制。操作员置位P1.O时,软件程序对P4口所有的位以8 s为周期进行置位、复位操作(见图3),模拟盘控制器开始巡检操作,模拟盘控制器的16路指示灯同时出现“红慢闪”状态,如果有1路或几路指示灯不进行“红慢闪”,则说明相对应的指示灯出故障,操作员可有针对性的排除故障;操作员复位P1.0时,程序进入到下一步操作――事故报警操作。
4.1.3 事故闪烁、解除
在实际操作中开关由于事故出现跳闸,监控器监测到后将信息通过CAN总线传送到模拟盘控制器上。模拟盘控制器根据通讯协议判断出那个开关量跳闸,然后对P4口的相应位以1 s为周期进行置位、复位操作,指示灯相应的位则进行“红快闪”。且指示灯的快闪状态持续到事故跳闸处理。
操作员根据模拟盘上的指示处理相应的跳闸事故后,给模拟盘发出解除命令,指示灯的事故闪烁停止,进入常态工作。
4.2 模拟盘通信协议及其中断服务程序设计
4.2.1 模拟盘通信协议
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证通信的实时性。CAN协议采用CRC检验并可提供相应)的错误处理功能,保证了数据通信的可靠性。基于CAN总线通信协议制订了模拟盘控制器的通信协议。
传输数据由2数据帧组成:在IDl中,D7~D4为传输数据的帧号;帧号代表传输数据为何种命令;监控器的站号由IDl中的D3~DO和ID2中的D7~D5共7位128种组合;可对应128个监控器监测的开关状态;ID2中的D4表示是否为远程帧ID2中的D3~DO表示数据的长度。

此协议首先充分利用了CAN通信协议自身的特点,在帧格式的ID号中体现发送的运行数据量的帧号和监控器的站号。帧号代表传输数据的类型,根据CAN总线的仲裁(CAN总线本身的ID号越小,优先权越大),可以将重要类型的数据规定为帧号较小,这样就可保证重要数据的优先级高于其他类型的数据,程序就会优先处理这些数据。又可利用仲裁,将重要的监控器排列的站号排列得较小,这样又可保证程序优先处理重要的监控器监控的开关状态。
4.2.2 CAN中断服务程序
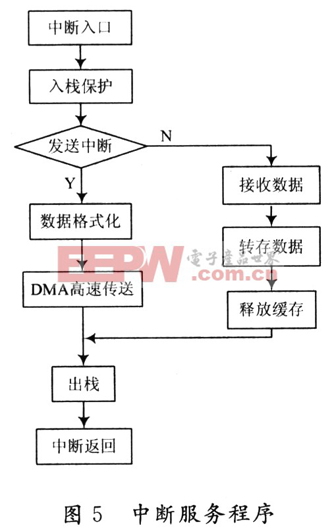
模拟盘控制器通过中断服务程序来受CAN总线上的数据,也是利用中断服务程序向CAN总线上发送数据。如果有发送中断或接收中断请求,运行程序就会进入CAN中断服务程序,入栈保护现场后,判断中断为何种中断(发送中断、接收中断)。并根据CAN总线的通信协议将要发送的数据帧格式或将接收的数据帧还原,然后发送或接收数据,最后出栈进入主运行程序继续运行。
5 结 语
本文采用国际上目前应用最为广泛的现场总线之一CAN总线微处理器技术,进行模拟盘控制器的硬、软件设计。通过与监控系统实际联网运行试验,所设计的模拟盘控制器能够很好地实现规定的功能和技术要求。本方案在煤矿地面变电所应用表明,对煤矿井下用电情况的监视得到明显地改善。












评论