基于WiFi及无线遥控技术远程控制井下铲运机

摘要:在地下施工环境恶劣,工作人员无法到达的情况下需要对机械进行遥控操作。利用WiFi无线通信跟无线电遥控技术对铲运机机进行无人驾驶遥控操作技术进行了相关的研究,在原有液压线路的基础上做了线路修改使其满足遥控要求。基于WiFi通过Ad Hoc方式直接建立点对点通信链路、地下无线网络,可以很好的实现自动化无人远程操作。
关键词:铲运机;WiFi;无线遥控;液压;点对点通信;远程操作
0 引言
随着采矿深度的增加,地下开采的环境质量越来越差,对人的健康及生命安全造成了严重的威胁,再加上严格的环保,安全法规的相继出台,造成了地下矿产开采成本的提高,为满足社会需求,必须要提高开采效率,因此催发了自动化技术的应运而生,而遥控系统的开发和应用势必成为必不可少的一部分。
特别在近几年随着无线网络应用于工业的技术的成熟,可以将WiFi无线网络配合无线电遥控操作技术应用于地下铲运机以实现远距离无线操作,也可以在遥控模式下,驾驶员在远离铲运机的安全区域,通过无线遥控手柄单元控制铲运机的各种动作。在生产效率上有了很大的提高,也在很大程度上保障了人的健康及生命安全。
1 地下装载机的遥控部分
1.1 手柄控制单元
1.1.1 手柄控制单元
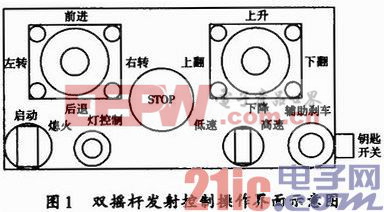
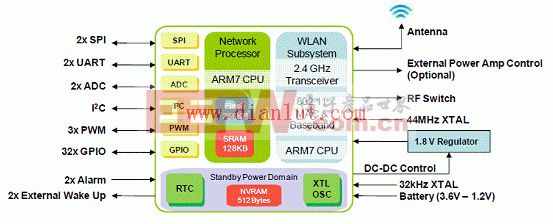
该单元包括一个带ARM内核微处理器的核心板,一个2.4 GHz无线通信模块,两个控制手柄,2.4 GHz天线,底层信号采集板等。该单元要控制装载机的前进/后退、换向、左转、右转、大臂举升、大臂下降、装料、卸料、油门增减。同时还要增加以下辅助功能,包括远程启动,熄火、驻车刹车、辅助刹车、前后灯的控制。采用无线遥控时,人员远离铲运机在安全区域作业时,可以借助操作盒,如图1所示,实现安全作业。
1.1.2 内部信号采集处理及传输
本系统中有4路速变模拟信号、8路缓变模拟信号。该采集系统能实现采集0~5 V之间的模拟信号,两者精度均在0.1%以内,信号记录时间均不低于0.75 s,整体设计如图2所示。在本系统中,由于模拟输入信号的电压范围是0~5 V,所以此次设计使用LM324运算放大器组成的比例电路将输入信号变换成0~2.5 V电压。然后输入模拟开关经过跟随器后,再输入A/D转换器。这里采用AD7492转换芯片,进行数据采样。AD7492是AD公司推出的12位高速、低功耗、逐次逼近式A/D转换器。它可在2.7~5.25 V的电压下工作,其数据通过率高达1 MSPS。可以满足采样标准要求。

首先,对于4路速变信号而言,其最低采样频率为40 kHz,系统要求的最低记录时间为0.75 s。采用了多路切换开关和一个AD7492循环进行数据采集,将4路速变信号和8路缓变信号交叉安排在ADG506上,这样在每次速变信号采集后,紧接着采集8路缓变信号,经过循环交叉采集后,使得速变信号采样率是缓变信号采样率的2倍。然后将12路信号经模/数转换后经ARM处理器处理后再经TLV5613数/模转换,通过编码器编码传送到无线发射模块,经过2.4 GHz无线天线将信号发射出去。采用的TLV5613转换器是12位电压输出数膜转换器(DAC),它具有一个与8位微控制器兼容的并行接口。使用三个不同的地址来写入8个最低位、4个最高位和3个控制位。TLV5613可工作于2.7~5.5 V较宽的电源电压范围。







评论