基于实时内核的电动车电子差速算法仿真
摘要 设计了一种基于嵌入式实时内核ARTXl66的电动车电子差速算法,介绍了基于Ackermann-Jeantand 转向模型的四轮速度关系、电子差速算法,并用MatIab/Simulink进行了仿真。通过实车试验证明了该算法的可行性。
关键词 Matlab/Simulink 电子差速算法 Infineon XCl64CS微控制器 实时内核 ARTXl66
引言
伴随着日益严重的大气污染和能源危机,传统的交通工具――汽车的发展面临着一系列的挑战。传统的内燃机汽车消耗大量的石油资源,严重污染环境。这些无法避免的缺点使人们意识到,以清洁能源为动力的新一代汽车替代传统汽车的重要性,其中的电动汽车技术已经成为当今汽车领域的前沿课题之一。
电动汽车具有零排放,低噪声,轻便,操控性能好等特点。此外随着电动轮技术和现场总线技术的发展,在电动车上更容易实现四轮独立驱动控制,进而为刹车防抱死系统(ABS)、电子稳定系统(ESP)等主动安全系统的实现提供便利。
本文介绍一种基于嵌入式实时内核ARTXl66的电子差速算法。
1 基于Ackermann转向模型的四轮速度关系
根据汽车动力学分析可知,车辆转弯行驶时,汽车外侧车轮的行程要比内侧的长。如果通过一根整轴将左右车轮连接在一起,则会由于左右车轮转速虽相等但行程不同而引起一侧车轮产生滑转或滑移,不仅使轮胎过早磨损,无益地消耗功率,并且易使汽车在转向时失去抗侧滑的能力而使稳定性变坏,操控性变差。为避免上述情况的出现,实现车辆的平顺转向,一般要求所有车轮在转向过程中都做纯滚动。对四轮独立驱动电动车而言,即要求四个车轮在转向过程中具有各自不同的转速,并且各车轮的转速应满足一定的关系。该关系为设计汽车差速系统的主要依据。低速情况下,这一特定关系可由Ackermann模型推导得出。
使用Ackermann转向模型进行转向时,分析四轮速度关系的假设前提条件为:
①刚性车体;
②车轮作纯滚动,即不考虑已发生滑移、滑转;
③行驶时所有轮胎都未离开地面;
④轮胎侧向变形与侧向力成正比。
该转向模型如图1所示。
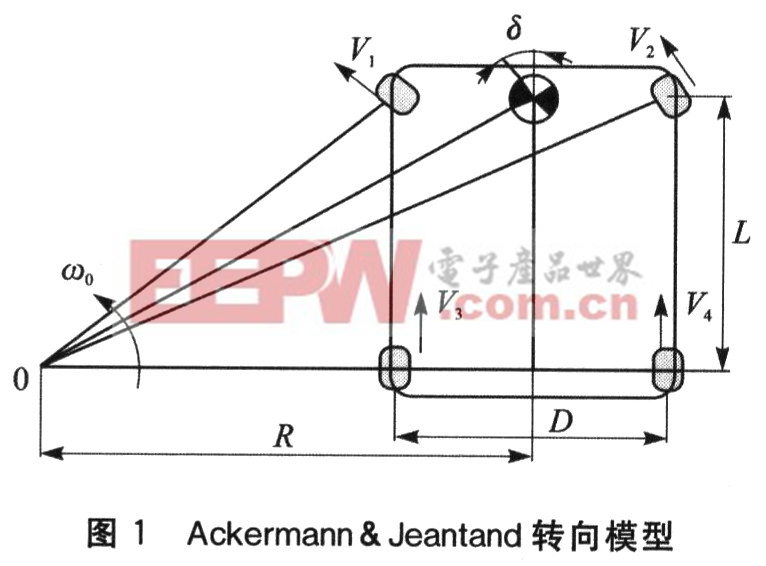
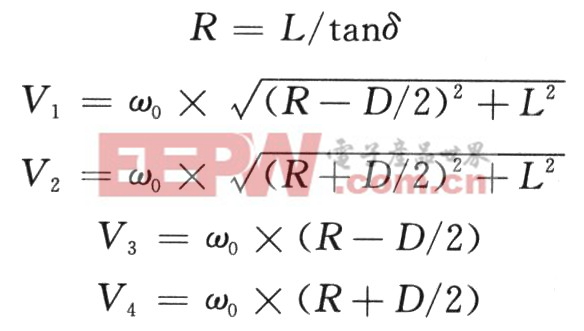
其中,轴距L和两侧轴线距离D是常数值,δ是方向盘的转角,ω0为车绕转向瞬心的角速度,V1、V2、V3、V4是4个转动轮的速度。由图1可得:








评论