基于DSP的异步电机矢量控制系统设计

0 引言
随着现代控制理论、微处理技术和电力电子技术的不断发展,基于矢量控制的高性能交流传动系统得到广泛的应用。异步电机是一个多变量、强耦合、非线性的时变参数系统,若以转子磁通这一旋转的空间矢量为参考坐标,再利用坐标变换,就可以把定子电流中的励磁分量和转矩分量独立开来分别进行控制。这就是矢量控制的出发点。SVPWM调制技术把逆变器和电机看成一个整体来处理,所得模型简单,便于处理器实时控制,并具有转矩脉动小、噪声低、电压利用率高等优点。本文以TI公司的专用电机控制芯片TMS320F2812为核心,给出了整个异步电机矢量控制系统的设计方案,并通过实验验证了其有效性。
1 异步电机矢量控制原理
矢量控制技术自从上世纪60、70年代开始,国内外众多专家学者就已经进行了潜心的研究,因此,矢量控制技术发展至今,内容已经非常丰富。本文只讨论基于转子磁场定向的矢量控制原理。
1.1 异步电机控制的数学模型
鼠笼式异步电机在d,q两相同步旋转坐标系下的数学模型的电压方程为:
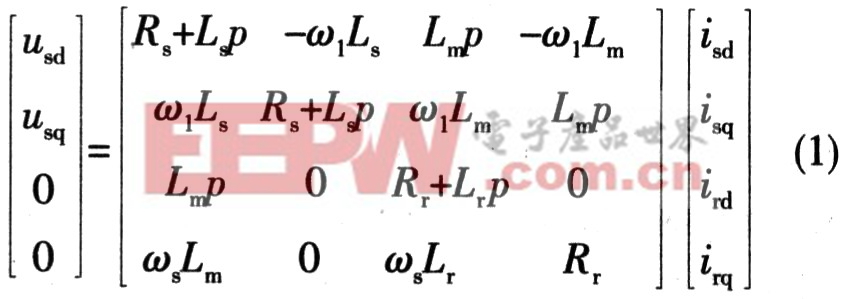
其中:usd和usq分别为d,q旋转坐标系下的定子电压;isd和isq分别为d,q旋转坐标系下的定子电流;ird和irq分别为d,q旋转坐标系下的转子电流;Rs和Ls分别为定子绕组的电阻与自感;Rr和Lr分别为定子绕组的电阻与自感;Lm为定转子互感;P为微分算子;ω1为同步旋转角频率;ωs为转差角频率;
将转子磁链矢量定在d轴方向上,可以推导出转子磁链为:

其中:Tr为转子时间常数。
由式(2)可见,调节定子电流的isd分量可以调节转子磁链ψr,而当保持该定子电流磁通分量不变时,转子磁通保持不变。其转矩方程为:

其中:Te为电磁转矩;np为电机的极对数;由式(3)可见,控制定子电流isq分量可以控制电机的电磁转矩Te,通过该转矩分量可以调节电机的转速。该控制系统采用双闭环结构,图1所示是其控制系统结构原理图。

该控制系统所检测的两相定子电流经Clarke与Park变换后可产生转矩电流分量和励磁电流分量,然后结合检测转速并通过电流模型计算坐标变换所需的磁链角。检测转速与给定转速误差经PI调节后将生成转矩给定值。转矩电流分量与励磁电流分量的误差经PI调节可产生u小M。给定值,并在通过旋转坐标变换后输入SVPWM模块以产生6路PWM波,从而控制逆变器。











评论