3 G网络的移动机器人远程监控系统

摘要:介绍了基于嵌入式Linux平台视频传输与控制系统的构建,给出了跨客户端通过3G网络进行远程视频传输的技术实现,并总结了在实现过程中遇到的难点以及对应的解决方案。
关键词:机器人;3G;Linux;CGI;Ajax
引言
3G是第三代移动通信技术,结合了无线通信技术和互联网等多媒体技术。随着3G技术的发展,它在声音和数据的传输速度上有很大提升,并能够在全球范围内实现无线漫游。其数据传输高速、永远在线、覆盖范围广等优点,有效地解决了移动机器人采用有线或者无线远程控制所带来的信息传输和控制距离等方面的瓶颈问题,使远程救援机器人、仿真机器人、家庭保姆机器人等移动机器人技术在大数据量实时传输方面多了一种可利用的解决方案。
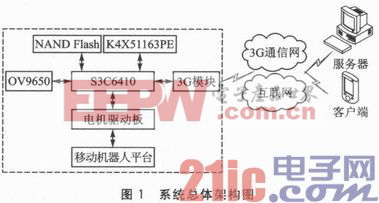
1 系统总体架构
本系统主要用来将移动机器人所采集到的视频数据通过3G网络传给服务器,再将服务器的控制信号传给电机驱动板,以驱动移动机器人平台运动,总体架构如图1所示。摄像头OV9650采集的视频图像经过JPEG压缩后,存入缓存区,当服务器监听到客户端的接入请求后,再将缓存区的数据通过网络传输给客户端的监控界面进行显示;当需要控制机器人行动时,客户端的控制按钮发送控制信息给服务器,服务器通过程序解析后控制底层电机驱动器,驱动机器人平台运动。
系统硬件平台核心处理器采用S3C6410,它基于ARM1176JZF—S内核,是一个16/32位RISC微处理器,其内部集成了强大的硬件加速器,包括音视频处理、2D加速等,为2.5G和3G通信服务提供了优化的硬件性能,工作频率最高可达677 MHz;采用2 GB NAND Flash,主要用于存放内核代码、应用程序、文件系统和数据资料;DDRSDRAM采用两片128 MB K4X51163PE芯片;摄像头采用CMOS图像传感器OV9650,最高输出130万像素(1300×1 024),具有高敏感度、低功耗、支持多种常用的图像格式输出、支持自动图像控制等优点。
Linux作为一种类Unix操作系统,具有稳定健壮、低成本、高性能、互操作性好和源代码开放等特点。而其良好的内核结构,以及可裁剪的特性,满足了嵌入式应用的差异性需求,使其在嵌入式系统领域占有一席之地。本系统中采用的Linux内核为3.0.1版本,文件系统采用YAFFS2,Bootloader选用uboot。
2 系统软件设计
2.1 视频数据的采集与传输
视频数据的采集通过Linux中视频设备OV9650的驱动以及Video for Linux提供的相应接口完成。为了方便,将视频采集的相关信息封装到以下结构体中:

采集程序通过函数init_s3c6410(struct vdIn*vd,char*device,int width,int height)来完成对摄像头以及采集参数的初始化,并通过函数s3c6410_Grab(struetvdIn*vd)完成对图像的抓取,用JPEG压缩算法对采集到的图像进行压缩,图像格式为RGB565。











评论