基于加速传感器的船舶振动检测系统设计

系统其他电路部分设计为:微处理器采用三星的S3C44B0X处理器,存储器为AMD公司的32Mbit(4M×8 Bit)Flash存储器AM29LV033C,图形液晶显示模块为含控制器T6963C的240×128点阵的SMG240128L,USB的接口电路使用芯片NUF2221W1T2,其它部分电路由于篇幅有限,这里不作详述。
软件部分设计
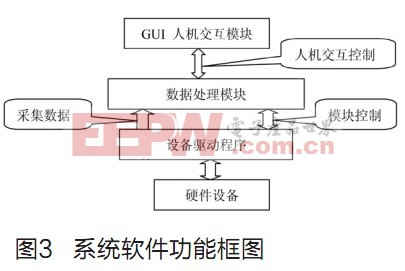
本系统由三大模块组成,如图3所示,从底层到上层分别是:数据采集驱动模块,数据处理模块,GUI人机交互模块。
软件系统实现的功能有两个:一个是数据检测采集,主要负责传感器的数据检测、采集和控制;另一个为采集数据的处理及人机显示,包括信号处理算法实现和数据存储,人机界面负责LCD驱动和文字图形的显示。操作系统首先通过设备驱动模型对传感器进行初始化,为传感器设置合适的配置参数,以使设备能在采集过程中正确工作;上层图形系统采用嵌入式GUI来实现人机交互界面,包括图形控制面板建立、波形显示、参考值显示等。软件流程如图4所示。

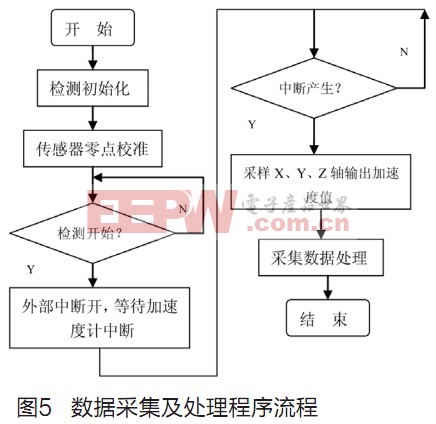
数据采集及处理部分的程序流程如图5所示。其中检测初始化包括检测模块上电,I/O控制端口初始化、加速度传感器的初始化;加速度传感器需要零点校准和自检测以满足精度要求;系统调用检测任务后,外部中断打开,等待加速度传感器的中断上报及检测数据采集。
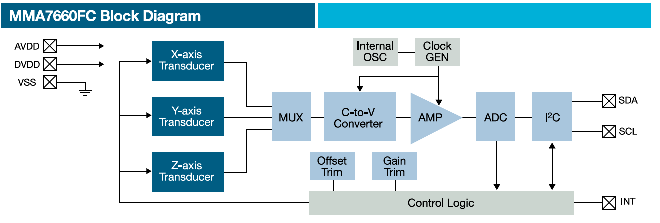
MMA7455L加速度传感器的驱动软件设计应注意IADDR0接到GND时其从地址为0x1D,接到DVDD_IO时其从地址为0x1E;MMA7455L有三种工作模式(测量模式、水平检测模式、脉冲检测模式),在测量模式下DRDY引脚与INT1共用,数据读取就能将DRDY清除,但在其他两种模式下INT1和INT2都需要通过写寄存器来清除。在检测数据采集时,把数据缓存到FIFO中,假如FIFO满了,有DMA控制将FIFO中的所有数据传输到内存当中进行处理,可完成数据信号显示和控制,存储和实时分析。
结语
本系统利用了微处理器功耗低及电子传感器集成度高的特点,设计出了一种结构简单、性价比好的检测系统,该系统能够进行实时性的数据采集处理,具有功耗低、抗干扰、可靠性高的优点,可以实现传统机械式船舶振动测试仪的全部功能,并且在体积、重量、精度等方面都有明显优势。产品原型已经完成系统调试和模拟测试,结果满足船舶振动检测的要求。此产品在船舶振动检测领域有广泛的应用前景。
参考文献
[1] 姚熊亮,张阿漫. 船体振动与噪声[M]. 北京:国防工业出版社 2010.8. 51-63.
[2] Freescale Semiconductor Technical Data[J]. MMA7455L Data Sheet,2007. 245-256.







评论