机器人技术基础系列:规划与导航

概览
本文引用地址:https://www.eepw.com.cn/article/106820.htm自主移动机器人的规划与导航包括利用有目的的抉择制定和执行来使系统实现最高级的目标。机器人是否胜任导航的能力必须通过两个技能来证明:路径规划和避障。
目录
1. 路径规划
2. 避障
3. 在中LabVIEW使用算法
路径规划
给定地图和目的地情况下的路径规划指的是机器人通过轨迹识别行进至目的地的能力。路径规划是至关重要的问题解决能力,因为机器人必须有能力决定在到达目的地前的路程中如何行进。
路径规划可分为两部分:表达与算法。路径规划人员首先将机器人环境转化为适合路径规划的形式。一些常用的技术包括广义的 Voronoi图、规则网格和四叉树。路径规划算法通常可用于几乎所有配置空间的表达,虽然某些方法会更适合特定表达。图1展示了LabVIEW中绘制的 Voronoi图。
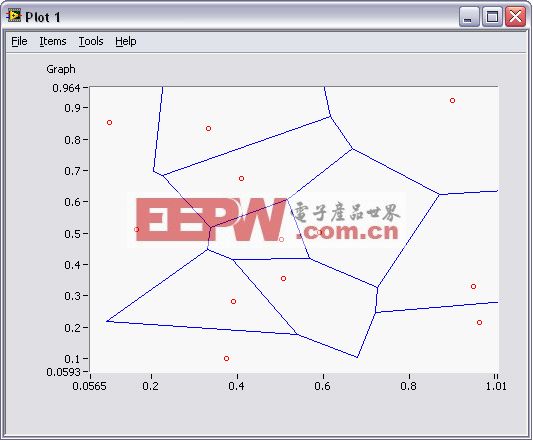
图1. LabVIEW中的Voronoi图
由于多数表达可转换为图表,初始节点和目标节点之间的路径可通过图搜索算法来计算。图搜索算法被计算机科学充分理解,然 而,许多算法要求程序访问图上的每个节点,以此来决定初始节点和目标节点间的最短路径。对于松连通图来说,访问每个节点是容易计算的,如Voronoi 图;但对于紧连通图来说计算开销迅速变大,如规则网格图。











评论