基于LIN总线汽车前灯运动控制系统的设计

引言
本文引用地址:https://www.eepw.com.cn/article/101025.htm随着社会的发展,汽车越来越普及,汽车应用已变得日益复杂,而且越来越多地采用电子驱动,因此,将更多创新技术及专用技术应用在这个领域也就不足为奇了。随着汽车拥有量的增加,发生交通事故的概率也随之增加,特别是在夜间行车,两车相汇,汽车前灯的控制就是一个重要的问题,目前汽车常包含有带动态位置控制的前灯,特别是对高强度放电(HID)氙气灯来说,动态位置控制功能非常关键。不过,前灯定位系统对电子组件提出了非常恶劣的环境要求。如何降低前灯运动控制设计的复杂度,节省时间、降低成本成为汽车电子研究的重要课题,本文针对汽车前灯控制的要求,介绍一种价格低,功能较齐,基于LIN总线汽车前灯运动控制系统的实现方法,对不同的步进驱动器/控制器组合,以实现汽车前灯运动控制系统最优化的系统设计方案。
系统硬件电路设计
LIN标准定义了一种车用分布式电子系统使用的低成本串行通讯系统。LIN是对现有车用多网络组合的补充,这些组合包括采用控制器局域网络(CAN)协议。LIN标准可以实现具有成本效益的车内开关、智能传感器和制动器应用的通讯网络。通讯协议是基于SCI (UART)数据格式,一种单主/多从的概念以及一个单线(外加地)12V总线。
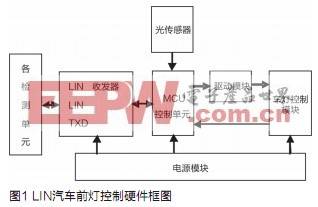
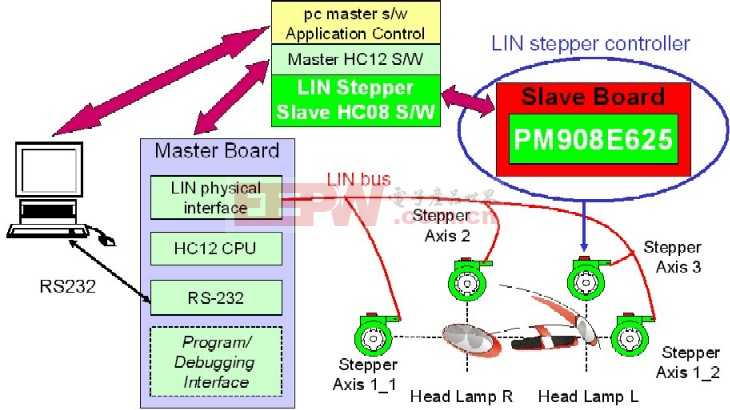
LIN从节点对总节点发出的控制信号进行处理,并对车灯驱动电路状态进行测量。当从节点接收到报文信息后,对车灯发出相应的控制信号,并分析各灯的状态,若发生故障,则生成一个数据信息发送到总节点。LIN从节点在检测到总节点发送的信号后,先通过报文帧进行识别,看其是否属于自己的报文信息。若属于则首先判断报文是不是查询信息,如果是,则返回一个响应信息,如果是控制信息,则对相应的车灯进行控制,并对该车灯驱动电路上的测量点电位进行测量和进行处理。看其是否发生故障。若发生故障,则通过 LIN总线发送信息给总节点。并根据传感器检测到前方来车的灯光信号,实时的作出判断,调整灯光的亮度和变化。图l示出LIN汽车前灯控制硬件框图。
MCU控制单元
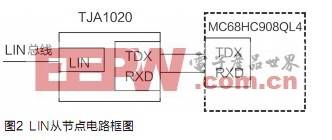
设计中MCU选用飞思卡尔M68HC08系列的MC68HC908QL4作为LIN从节点的MCU,其电路框图如图2所示。16引脚TOP封装的QL4芯片,VDD接+5V电源,SLCTX、SLCRX引脚分别接LIN的收发器(TJA1020)的TXD、RXD引脚。经过收发器LIN引脚进来+12V的LIN信号,经过收发器转换成+5V的接受和发送信号,分别传到QL4的接受和发送引脚。
从节点在初始化完成后,其它操作都在中断里面完成。SLIC状态向量寄存器(SLCSV)提供一个索引偏移量直接反映LIN模块当前的工作状态,它可以和用户提供的跳转表一起用来快速进入一个中断服务子程序。LIN模块的所有状态在SLCSV里面都有相应的值对应,其值不仅反映LIN模块状态的索引偏移量,还反映中断的优先级。







评论