Camsys 时间戳信息简介

不同平台时间戳介绍
1.征程 3 平台
J3 时间戳和frameid相关的结构体定义如下:
驱动接口:
struct frame_id {
u32 frame_id;
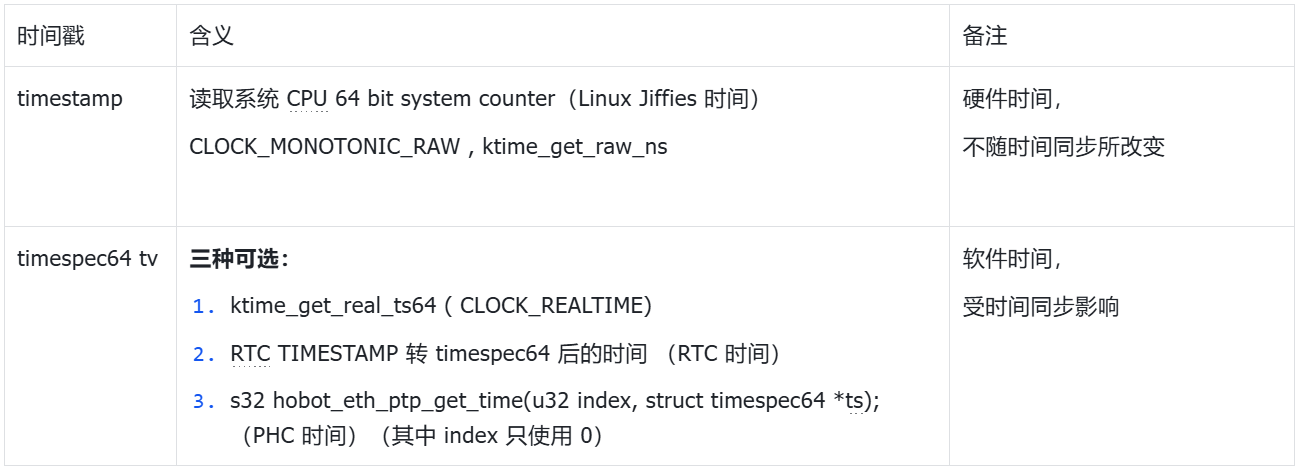
u64 timestamps;
struct timeval tv;
};
HAL结构体:
typedef struct image_info_s {
uint16_t sensor_id;
uint32_t pipeline_id;
uint32_t frame_id;
uint64_t time_stamp; //HW time stamp 硬件时间
struct timeval tv; //system time of hal get buf,系统时间
int buf_index;
int img_format;
int fd[HB_VIO_BUFFER_MAX_PLANES];//ion buf fd
uint32_t size[HB_VIO_BUFFER_MAX_PLANES];
uint32_t planeCount;
uint32_t dynamic_flag;
uint32_t water_mark_line;
VIO_DATA_TYPE_E data_type;
buffer_state_e state;
} image_info_t;2.征程 5 平台
typedef struct _frame_info_s{
uint32_t frame_id;
uint64_t timestamps;//hw_timestamp (硬件时间戳)
struct timeval tv;// 系统时间(软件时间戳)
uint32_t format;
uint32_t height;
uint32_t width;
uint64_t addr[7];
uint32_t pre_int;
uint32_t num_planes;
int32_t bufferindex;
uint32_t pixel_length;
uint32_t dynamic_flag;
} frame_info_t;3.征程 6 平台
typedef struct image_info_s {
uint16_t sensor_id; /**< sensor id */
uint32_t pipeline_id; /**< pipeline id */
uint32_t frame_id; /**< frame id */
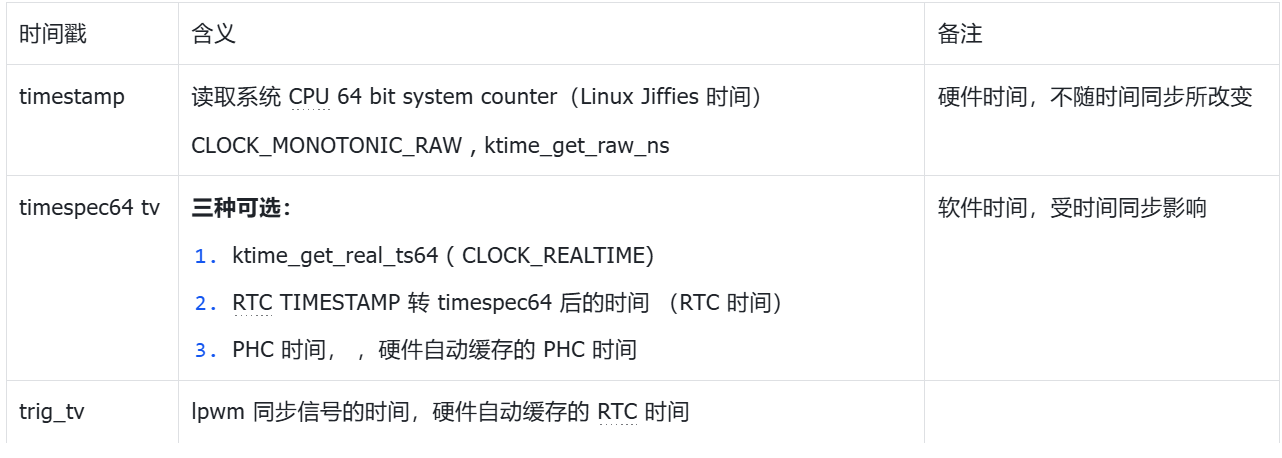
uint64_t time_stamp; /**< HW time stamp */
struct timeval tv; /**< system time of hal get buf */
int32_t buf_index; /**< buffer index */
int32_t img_format; /**< image format */
int32_t fd[HB_VIO_BUFFER_MAX_PLANES]; /**< ion buf fd */
uint32_t size[HB_VIO_BUFFER_MAX_PLANES]; /**< buffer size per plane */
uint32_t planeCount; /**< image plane count */
uint32_t dynamic_flag; /**< dynamic flag */
uint32_t water_mark_line; /**< water mark line value */
VIO_DATA_TYPE_E data_type; /**< buffer data type */
buffer_state_e state; /**< buffer state */
uint64_t desc; /**< temp description for isp raw feedback */
struct timeval trig_tv;/**< system time of lpwm trigger */
} image_info_t;专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
算法
自动驾驶
算法工具链
地平线
征程5
相关推荐
实时训练驾驶人工智能
ADI:传感技术助力未来自动驾驶的发展
高阶智驾要落地,线控底盘为什么必须执行得准
有关指纹算法
计算机科学与技术反思录(2)
求FSK信号的解调算法,主要是铁路上的移频信号!
vxwokrs下静态图像压缩算法(上)
2035年自动驾驶出租车市场规模将达1680亿美元
面向算法硬件加速的FPGA实现方法
76-81GHz自动驾驶CMOS RADAR
掘金自动驾驶,不要把大坑当机会
目标跟踪算法在红外热成像跟踪技术上的应用
特斯拉监督版FSD加入中国市场
曲面显示屏取代传统汽车挡风玻璃
CRC算法原理及C语言实现
自动驾驶正推动汽车行业加速布局人形机器人
简单实用的单片机CRC 快速算法
PID算法
数字PID控制及其改进算法的应用
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
数字PID控制算法之一
无线传感器网络低功耗分簇路由算法设计
携手ADI赢得未来
地平线征程 6 系列集成 Cadence Tensilica Vision DSP,实现规模化量产,合作加速智能驾驶解决方案部署
采用Mean-Shift和Camshift算法相结合的火焰视频图像跟踪设计
基于LPC2138的血压测量算法开发平台电路图
加快实现自动驾驶(完整小组讨论)
自动驾驶的现状与未来(节选)
[转帖]us/os就绪表的维护算法分析
加密算法之MD5算法