征程 6 | BPU trace 简介与实操

一、BPU trace 理论基础
1.1 BPU Trace 配置文件模板
# BPU trace
data_sources: {
config {
name: "linux.sys_stats"
sys_stats_config {
bputrace_period_ms: 500
# bpuinfo_period_ms: 500
}
}
}root@hobot:/map/xxx/inner# echo 1 > /sys/devices/system/bpu/bpu0/trace -bash: echo: write error: Invalid argument root@hobot:/map/xxx/inner# cat /sys/devices/system/bpu/bpu0/power_enable 1 root@hobot:/map/xxx/inner# echo 0 > /sys/devices/system/bpu/bpu0/power_enable root@hobot:/map/xxx/inner# cat /sys/devices/system/bpu/bpu0/power_enable 0 root@hobot:/map/xxx/inner# echo 1 > /sys/devices/system/bpu/bpu0/trace root@hobot:/map/xxx/inner#
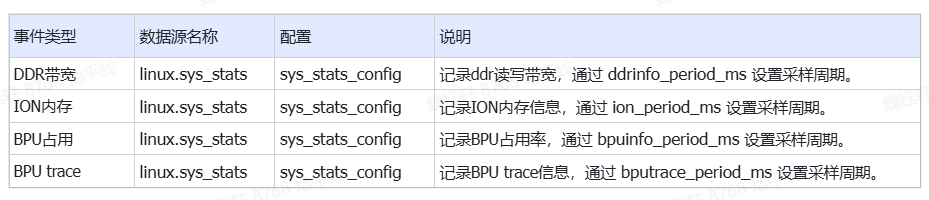
1.2 常用数据源介绍
二、BPU trace 使用基础示例
2.1 基础示例运行
终端 A
# 启动 trace 服务。 # 只需要启动一次,如果已经启动,则不需要再次启动。 tracebox traced --background # 运行数据捕获服务。 # 只需要启动一次,如果已经启动,则不需要再次启动。 tracebox traced_probes --background --reset-ftrace # -c:指定perfetto 配置文件。 # -o:指定输出trace数据文件路径。 tracebox perfetto --txt -c ucp_bpu_trace.cfg -o ucp.pftrace
终端 B
export HB_UCP_PERFETTO_CONFIG_PATH=ucp_system.json export HB_UCP_ENABLE_PERFETTO=true
hrt_model_exec perf --model_file xxx.hbm --frame_count 50 --thread_num 1 & hrt_model_exec perf --model_file ***.hbm --frame_count 10 --thread_num 1
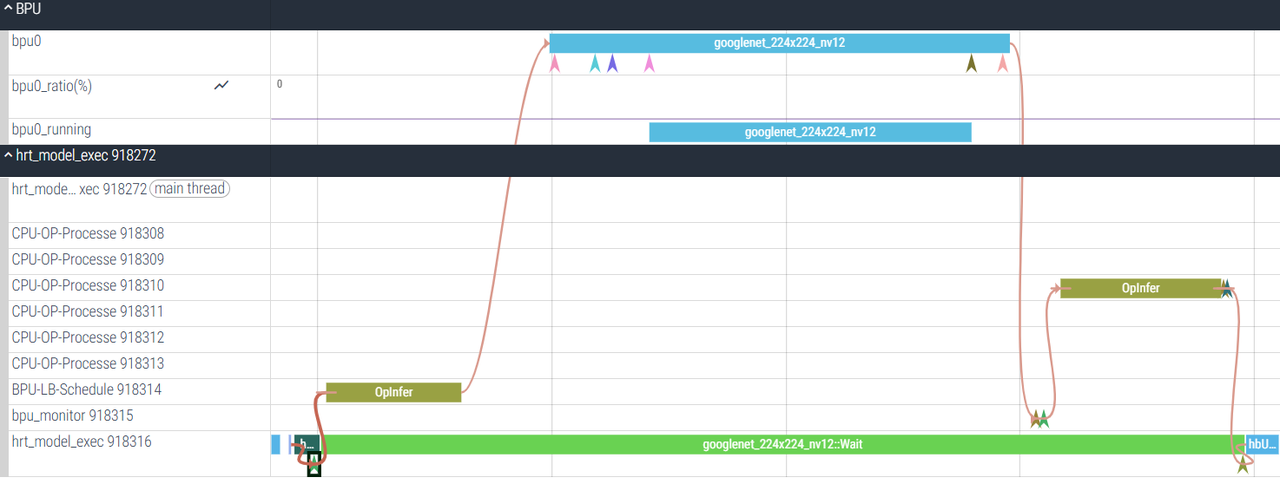
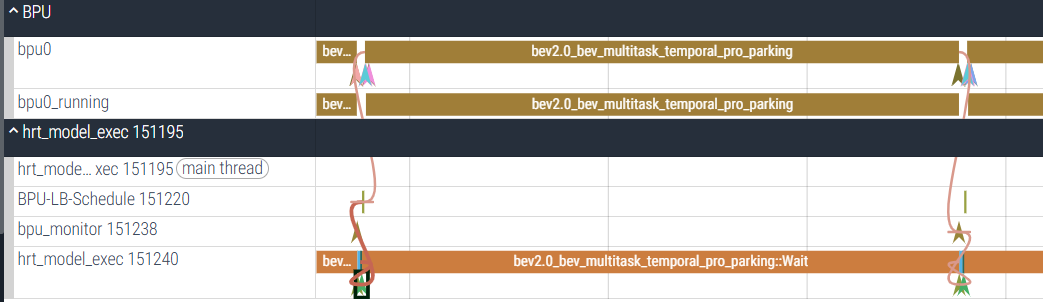
2.2 BPU Trace 文件解读
三、进阶内容
3.1 偶发推理问题如何 trace
# Sampling duration: 单位是ms,0表示持续抓取
duration_ms: 0
write_into_file: true # 按照设定的周期,将buffer写入到文件
# Writes the userspace buffer into the file every 2.5 seconds.
file_write_period_ms: 2500 # 控制buffer写文件,不是覆盖,相当于控制落盘,这个参数一般不需要特别指定
# buffer 0
buffers {
size_kb: 65536 # 如果出现数据丢失,则设置更大一些
fill_policy: RING_BUFFER
}
# buffer 1
buffers {
size_kb: 131072 # 如果出现数据丢失,则设置更大一些
fill_policy: RING_BUFFER
}
# UCP data source
data_sources: {
config {
name: "track_event"
target_buffer: 0
track_event_config {
enabled_categories: "dnn"
}
}
}3.2 BPU_LB_Schedule 线程简介
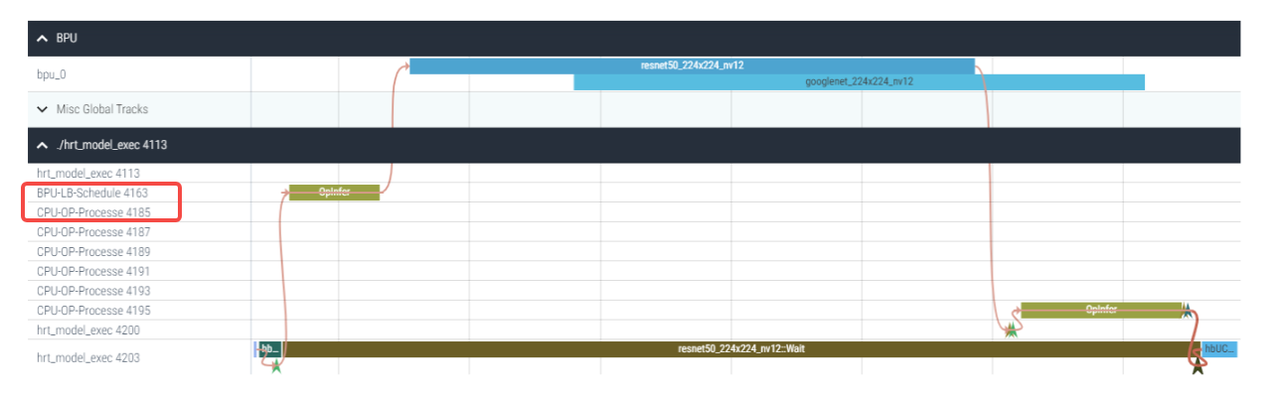
3.3 CPU-OP-Processe 线程简介
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
算法
自动驾驶
算法工具链
地平线
征程5
相关推荐
vxwokrs下静态图像压缩算法(上)
实时训练驾驶人工智能
76-81GHz自动驾驶CMOS RADAR
2035年自动驾驶出租车市场规模将达1680亿美元
掘金自动驾驶,不要把大坑当机会
[转帖]us/os就绪表的维护算法分析
自动驾驶正推动汽车行业加速布局人形机器人
ADI:传感技术助力未来自动驾驶的发展
面向算法硬件加速的FPGA实现方法
无线传感器网络低功耗分簇路由算法设计
地平线征程 6 系列集成 Cadence Tensilica Vision DSP,实现规模化量产,合作加速智能驾驶解决方案部署
曲面显示屏取代传统汽车挡风玻璃
加密算法之MD5算法
采用Mean-Shift和Camshift算法相结合的火焰视频图像跟踪设计
目标跟踪算法在红外热成像跟踪技术上的应用
加快实现自动驾驶(完整小组讨论)
简单实用的单片机CRC 快速算法
数字PID控制算法之一
CRC算法原理及C语言实现
携手ADI赢得未来
PID算法
基于LPC2138的血压测量算法开发平台电路图
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
有关指纹算法
自动驾驶的现状与未来(节选)
高阶智驾要落地,线控底盘为什么必须执行得准
特斯拉监督版FSD加入中国市场
计算机科学与技术反思录(2)
求FSK信号的解调算法,主要是铁路上的移频信号!
数字PID控制及其改进算法的应用