征程 6X CAMSYS 性能测试方案介绍

CAMSYS 其性能指标主要包括:帧率、延迟,以及系统的 DDR 带宽、CPU 占用率等。
对于帧率、延迟,通过在驱动中创建 trace event,分别记录通路上的每个 IP,每帧开始处理(frame_start)和结束处理(frame_end)的时间戳信息和帧信息,来实现帧率计算和延迟统计。
1.1帧率统计
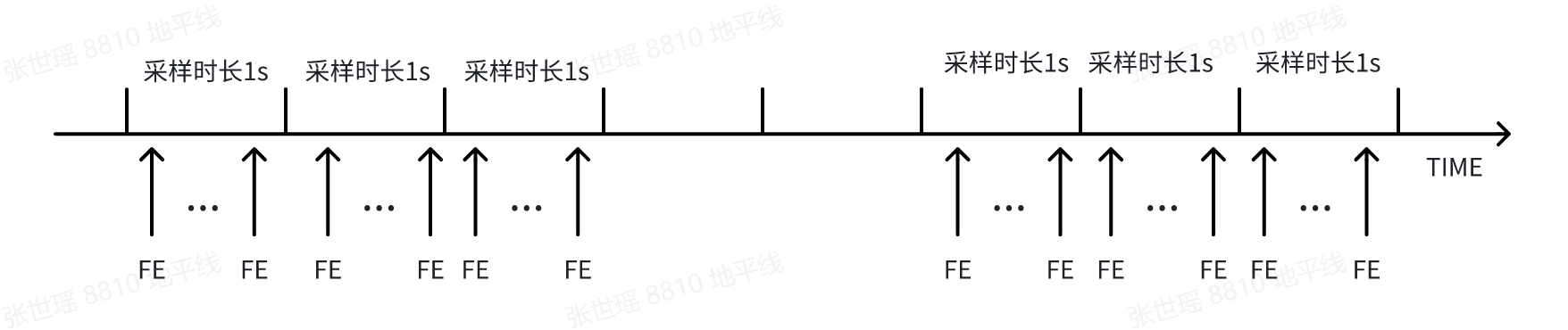
每个模块处理完成后会产生一个 frame_done 中断,此时会记录下一个 event 点,此时在时间轴上每一帧则对应一个个离散的点。按照时间进行 resample(重采样),得到每秒的帧率数据序列,此种方法可以较为直观的反应帧率变化。
1.2延迟统计
对于延迟会统计两个数据,第一个是硬件处理引入的耗时,这个数据一般与处理尺寸相关相对固定,这个耗时称为模块延迟(module latency);另外一个是从 cim 接受到一行数据产生 frame_start 开始到当前模块 frame_end 的耗时,这个耗时包括 sensor 的出图完成+前级 IP 硬件处理耗时+软件耗时,这个延迟称为到某模块的通路延迟(flow latency)。
1.2.1模块延迟
只需要将该模块 trace 的帧 event 中的 fe 时间戳 - fs 时间戳即可得到硬件处理耗时,即为 module latency
| CIM | CIM FE - CIM FS | |
| ISP | ISP FE - ISP FS | |
| YNR | YNR FE - YNR FS | |
| PYM | PYM FE - PYM FS | |
| GDC | GDC FE - GDC FS | 此处 GDC FS 不代表中断,指得是配置寄存器 triger 硬件开始处理得时间 |
| STITCH | STITCH FE - STITCH FS | 此处 stitch FS 不代表中断,指得是配置寄存器 triger 硬件开始处理得时间 |
1.2.2通路延迟
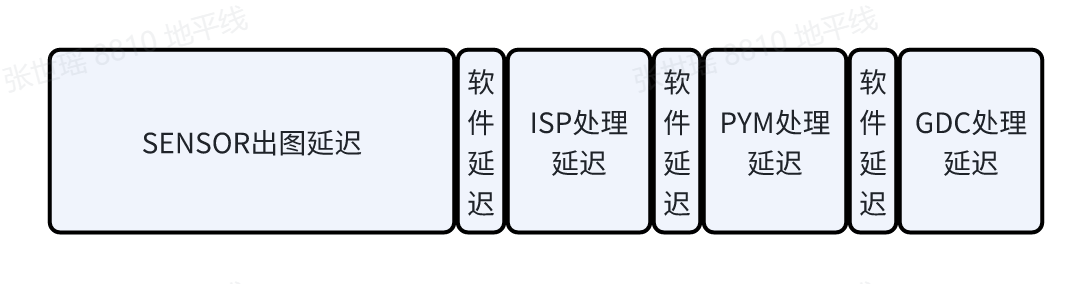
在 trace 的 event 中会传递 cim 的 fs 时间戳(timestamp),因此只需将模块的 fe event 时间戳-timestamp,即可得到从第一行像素输入开始到当前的整个通路延迟。
如以到 GDC 的通路延迟为例,那么统计的通路延迟就包含如图所示的所有延迟。
| CIM | CIM FE - CIM FS | 等同于 CIM 的模块延迟 |
| ISP | ISP FE - CIM FS | |
| YNR | YNR FE - CIM FS | |
| PYM | PYM FE - CIM FS | |
| GDC | GDC FE- CIM FS | |
| STITCH | STITCH FE - CIM FS |
1.3CPU 占用率统计
统计两个指标,一个是统计测试时 CPU 整体的 load;第二个是开发工具统计感知通路相关进程以及内核线程造成的 CPU 开销。前者反应当前测试的环境的状态,后者反应 CAMSYS 软件的开销。
1.4DDR 带宽统计
使用 hurt_ddr 工具获取 DDR 读写信息,主要统计整体的 DDR 读写带宽与 CMA SYS 的读写带宽。
2报告解读
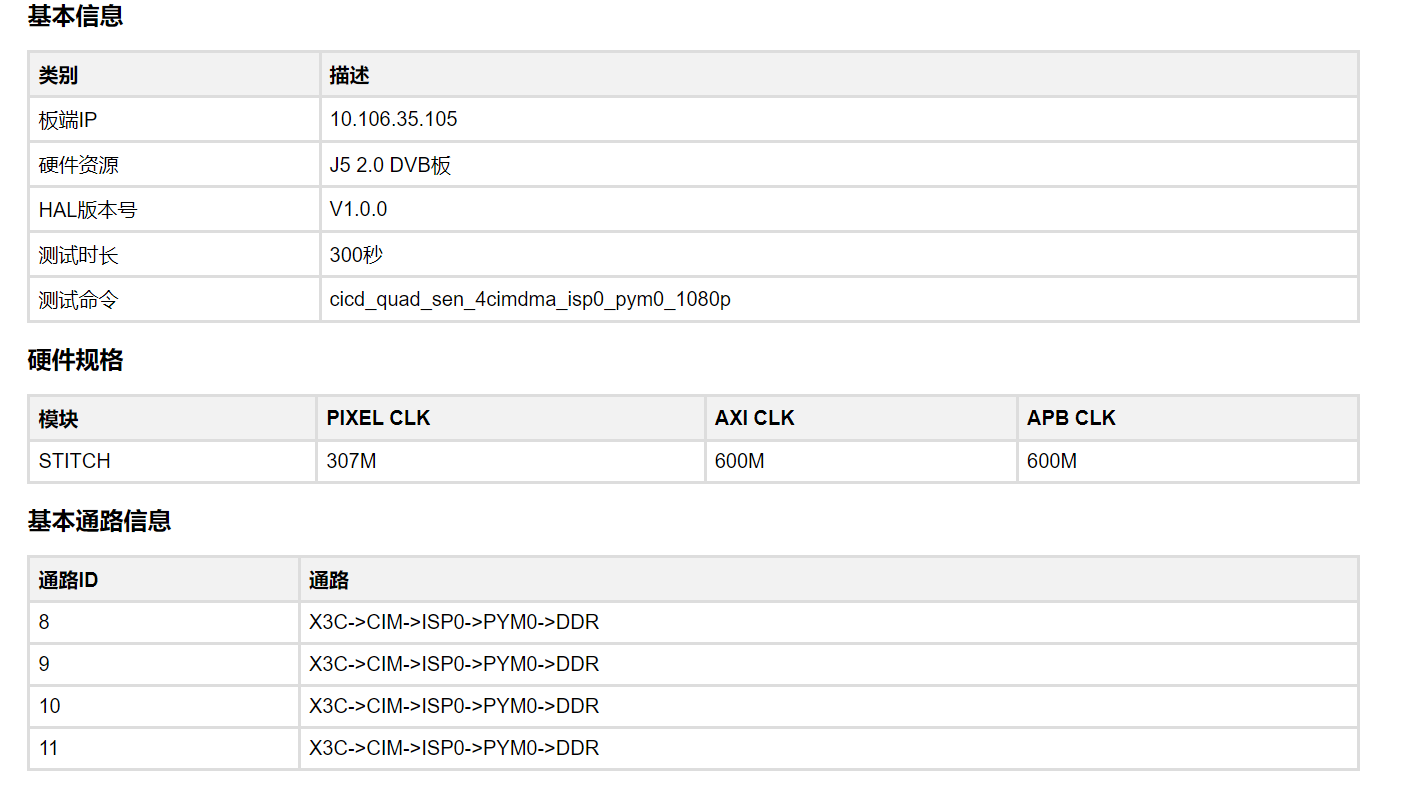
基础数据信息中包含着测试环境、测试用例等固定信息
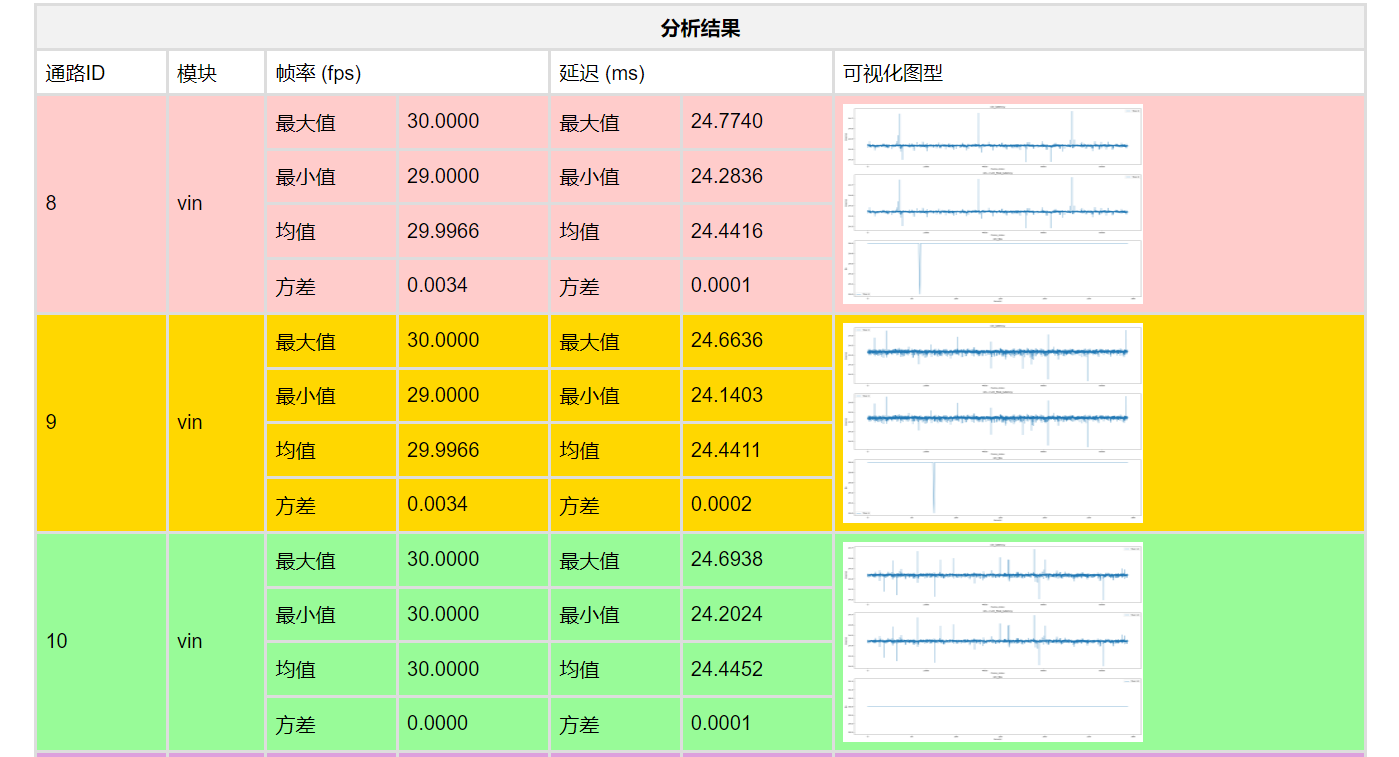
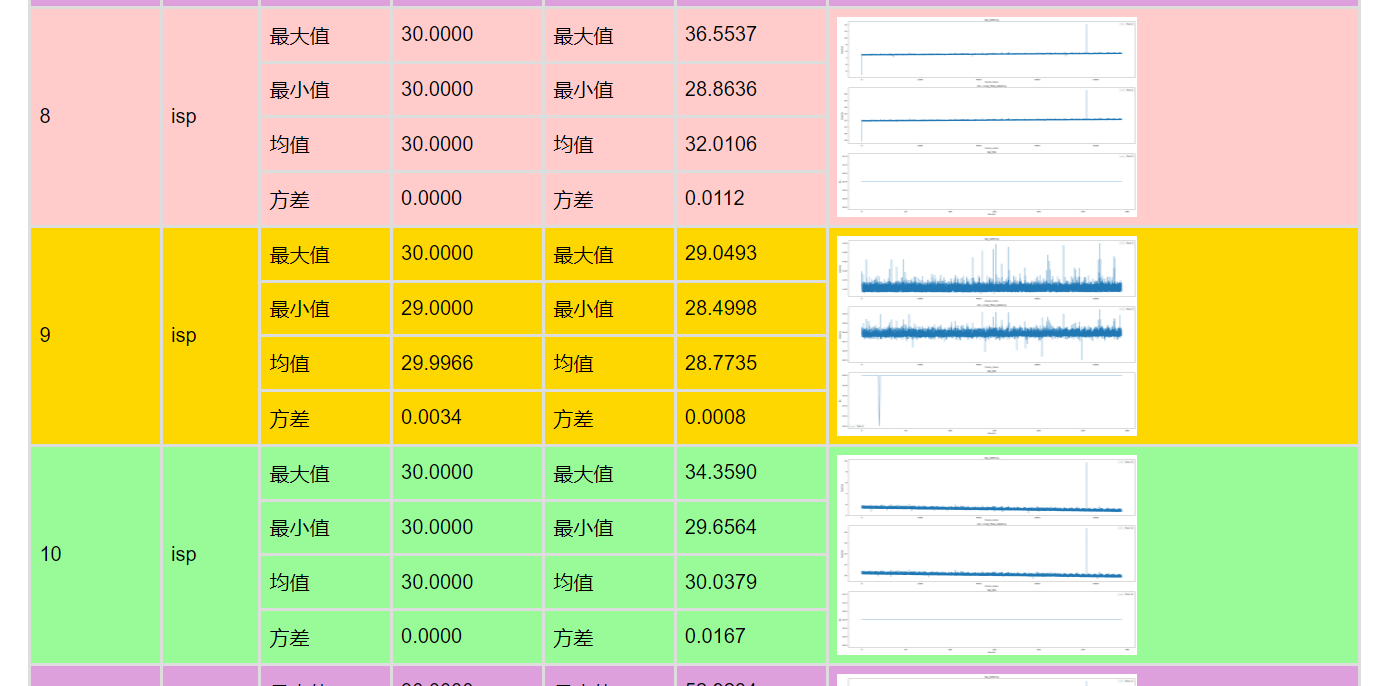
数据分析划分为两部分,第一部分为 VPS 的帧率、延迟分析,每个颜色块对应着某一条通路在该模块的帧率和延迟数据,其中延迟为到该模块的通路延迟。
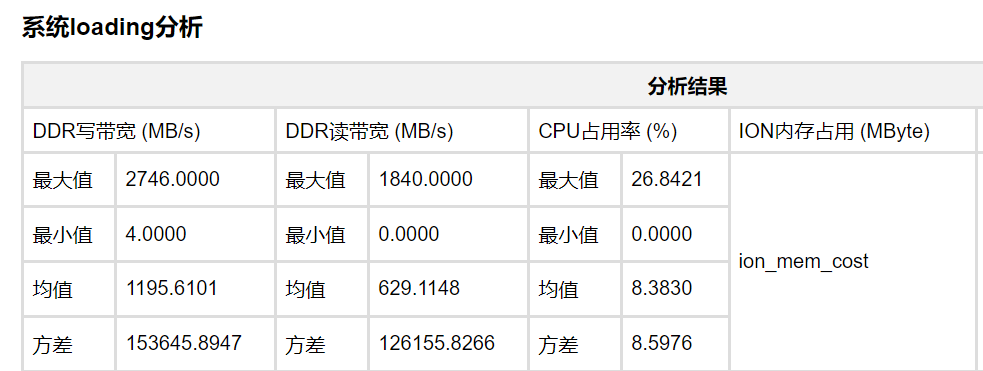
 第二部分为系统 load 分析,包括系统整体的 CPU、DDR load,也包括 VPS 对应的 CPU load、CMA SYS 读写带宽
第二部分为系统 load 分析,包括系统整体的 CPU、DDR load,也包括 VPS 对应的 CPU load、CMA SYS 读写带宽
2.1可视化图形解读
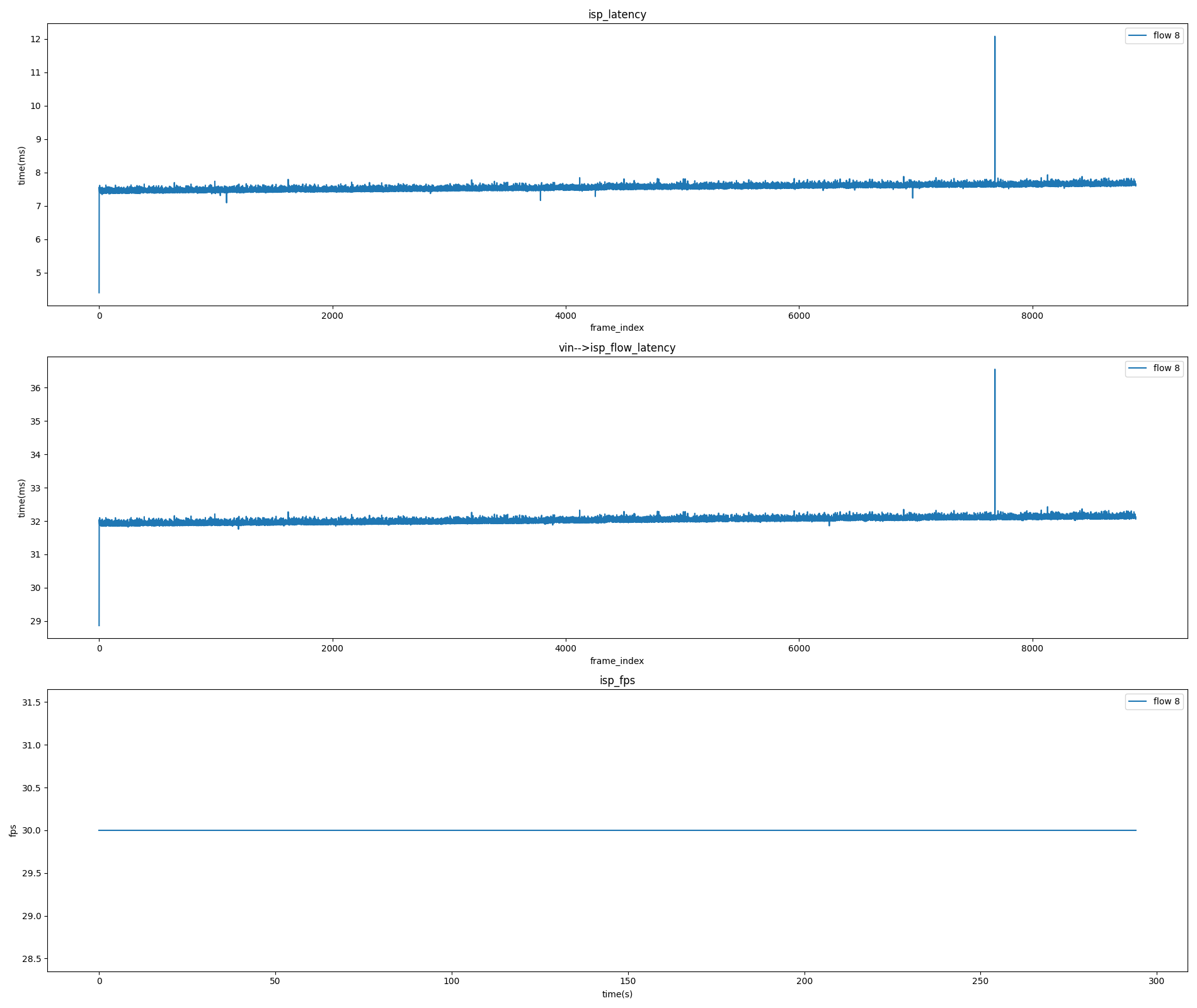
VPS 的数据分析中, 每个模块的每个通路对应一个可视化结果: 第一个子图为模块的硬件处理耗时,纵轴为耗时(ms),横轴为帧序,如下图的 isp_latency;
第三个子图为对应的帧率统计序列,纵轴为帧率),横轴为时间(s)
系统负载分析中,第一个子图为 CPU load, 纵轴为 loading(%),横轴为时间(s);第二个子图为 DDR 读写带宽,纵轴为带宽(MB/s),横轴为时间(s)。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
[转帖]us/os就绪表的维护算法分析
掘金自动驾驶,不要把大坑当机会
加快实现自动驾驶(完整小组讨论)
数字PID控制及其改进算法的应用
基于LPC2138的血压测量算法开发平台电路图
目标跟踪算法在红外热成像跟踪技术上的应用
自动驾驶的现状与未来(节选)
求FSK信号的解调算法,主要是铁路上的移频信号!
简单实用的单片机CRC 快速算法
实时训练驾驶人工智能
2035年自动驾驶出租车市场规模将达1680亿美元
地平线征程 6 系列集成 Cadence Tensilica Vision DSP,实现规模化量产,合作加速智能驾驶解决方案部署
CRC算法原理及C语言实现
计算机科学与技术反思录(2)
数字PID控制算法之一
vxwokrs下静态图像压缩算法(上)
高阶智驾要落地,线控底盘为什么必须执行得准
采用Mean-Shift和Camshift算法相结合的火焰视频图像跟踪设计
自动驾驶正推动汽车行业加速布局人形机器人
PID算法
ADI:传感技术助力未来自动驾驶的发展
无线传感器网络低功耗分簇路由算法设计
76-81GHz自动驾驶CMOS RADAR
携手ADI赢得未来
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
特斯拉监督版FSD加入中国市场
加密算法之MD5算法
曲面显示屏取代传统汽车挡风玻璃
面向算法硬件加速的FPGA实现方法
有关指纹算法