智能驾驶中的 感知 模块介绍

现在大家不都是在提倡感知规控“端到端”吗?为什么还要拆开介绍?个人理解:完全端到端还有很长一段时间要走,了解感知模块,没什么坏处。
1.感知的定义
感知是指通过传感器获取环境信息并将其转化为可用数据的过程。在自动驾驶中,感知技术主要包括目标检测、识别、跟踪、分割、预测等。没有可靠的感知技术,下游规控很难进行决策,自动驾驶系统也很难实现安全驾驶。
2.感知硬件
感知系统通常由多种传感器和数据处理单元组成。常见的传感器包括:
激光雷达(LiDAR):通过激光扫描获取高精度的三维点云数据,能够准确测量物体的位置和形状。
摄像头:提供高分辨率的视觉信息,用于识别物体的颜色、形状以及交通标志等。
毫米波雷达:擅长检测动态物体,尤其适合在恶劣天气条件下工作。
超声波传感器:用于近距离障碍物检测,常用于泊车场景。
有了这些传感器,怎么把它们采集到的信息用起来呢?这就涉及到数据流转的计算单元了。常见的数据处理单元包括:
Image Pyramid(简称Pyramid,图像金字塔)用于对输入的图像按照金字塔图层的方式处理,并输出到DDR,可实现对图像多尺度的缩小、裁剪,输出图像数据可直接用于BPU上的模型推理;
GDC (Geometry and Distortion Correction,几何校正和失真校正)可将输入的图像进行视角变换、畸变校正和指定角度(0,90,180,270)旋转,常用于对鱼眼相机图像的畸变矫正;
Stitch可对输入的图像进行裁剪、拼接,常用于AVM的环视图像拼接;
ISP(Image Signal Processing) 图像信号处理。主要用来对前端图像传感器输出信号处理的单元,以匹配不同厂商的图像传感器。
NPU(NeuralNetwork Processing Unit)神经网络处理器:常见的有GPU、BPU等。
CPU(Central Processing Unit)中央处理器,常用于解释计算机指令以及处理软件中的数据。
有了输入数据传感器和数据处理单元后,下面就涉及到感知模块常用的算法了。
3.关键算法
智能驾驶感知技术依赖于多种算法模型,以下是几种常用的算法:
目标检测与识别:通过摄像头数据检测识别出车辆、行人、交通标志等。
点云分割与分类:通过激光雷达点云处理技术,识别障碍物和行驶道路。
多传感器融合:结合激光雷达、摄像头的数据,提高感知的准确性和鲁棒性。
轨迹预测:对检测出的动态物体运动轨迹进行预测,为路径规划和决策提供支持。
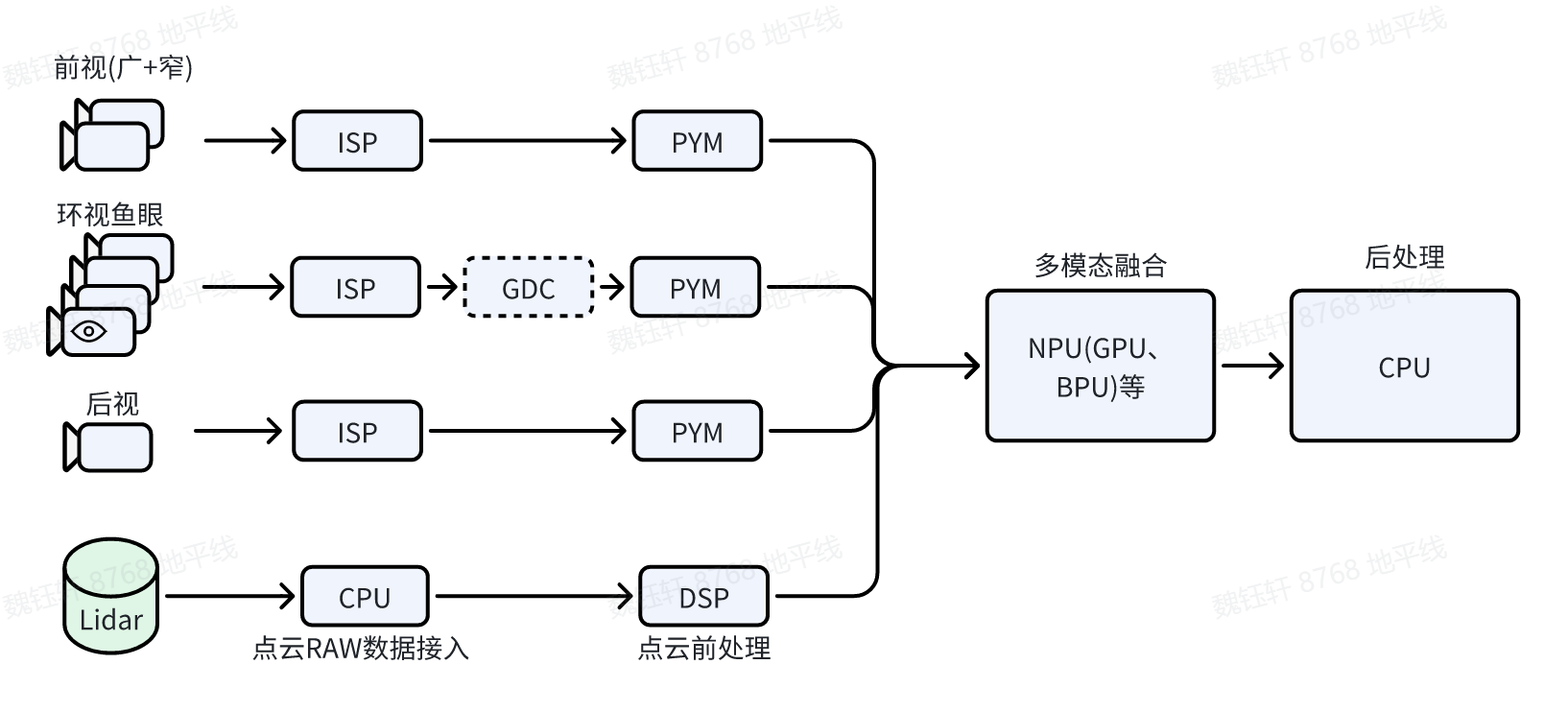
4.数据通路
以一个多传感器、多视角融合算法模型为例,介绍如何将整个数据通路串接起来,前面介绍的传感器和数据处理单元也会一起用起来。
5.感知技术的挑战
尽管感知技术已经取得显著进展,但仍然面临诸多挑战:
复杂环境下的可靠性:在雨雪、大雾、强光等恶劣天气条件下,传感器的性能会大幅下降,影响感知系统的可靠性。
计算效率:感知算法需要实时处理大量数据,计算复杂度高,对硬件性能要求极高。
传感器成本:高性能传感器如激光雷达成本较高,限制了其在量产车上的普及。
误检与漏检:在复杂场景中,感知系统可能出现误检(将无威胁物体识别为障碍)或漏检(忽略真实威胁)的情况,影响驾驶安全性。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
[转帖]us/os就绪表的维护算法分析
掘金自动驾驶,不要把大坑当机会
自动驾驶的现状与未来(节选)
实时训练驾驶人工智能
76-81GHz自动驾驶CMOS RADAR
目标跟踪算法在红外热成像跟踪技术上的应用
携手ADI赢得未来
自动驾驶正推动汽车行业加速布局人形机器人
计算机科学与技术反思录(2)
数字PID控制算法之一
面向算法硬件加速的FPGA实现方法
曲面显示屏取代传统汽车挡风玻璃
vxwokrs下静态图像压缩算法(上)
特斯拉监督版FSD加入中国市场
加快实现自动驾驶(完整小组讨论)
加密算法之MD5算法
地平线征程 6 系列集成 Cadence Tensilica Vision DSP,实现规模化量产,合作加速智能驾驶解决方案部署
求FSK信号的解调算法,主要是铁路上的移频信号!
无线传感器网络低功耗分簇路由算法设计
PID算法
高阶智驾要落地,线控底盘为什么必须执行得准
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
数字PID控制及其改进算法的应用
有关指纹算法
简单实用的单片机CRC 快速算法
2035年自动驾驶出租车市场规模将达1680亿美元
基于LPC2138的血压测量算法开发平台电路图
CRC算法原理及C语言实现
采用Mean-Shift和Camshift算法相结合的火焰视频图像跟踪设计
ADI:传感技术助力未来自动驾驶的发展