美国、欧洲、日本的手术机器人临床应用已较为成熟,国内受制于技术起步晚、医疗认证周期较长等原因,目前进入临床应用的还不多。不过已有不少科研团队已经进入这个赛道,走在融资、研发、拿证的路上。应用场景涵盖多个领域,包括:骨科手术、神经外科、肿瘤消融、其它微创手术、整形外科、牙科、植发、按摩、针灸、减肥等。
如何研发一套完整的手术机器人?创业团队需要掌握哪些关键技术?
手术机器人的价值在于它的精准性和稳定性。因为人的眼睛误差远大于精密光学仪器,人的手也会抖动或疲劳而机械臂不会。所以,一套手术机器人首先需要一个机械臂来替代医生的手,或帮助医生进行手术器械的辅助定位。如下图:

(医疗机械臂)

(辅助手术定位)
其次,手术机器人只有手是不行的,它还需要一双眼睛。因为有了视觉,才可以保证手臂能够按照医生的手术规划进行精确的移动或旋转(六自由度移动)。这就需要一套三维空间定位系统,根据技术原理不同一般分为两种类型:红外光学定位系统、电磁定位系统。如下图所示:

(红外光学定位系统)

(红外光学定位系统反光球工具)

(电磁定位系统)

(电磁定位系统sensor)
好了,有了机器人的手臂和眼睛这些必备的硬件外,其余就需要科研团队的软件能力了,也就是手术机器人的大脑。这些大脑功能大致包括:DICOM医学影像三维重建、图像分割、坐标系配准、影像分析、多模态融合、手术前规划、术中器械实时导航、术后评估等功能。当然除此以外,系统还需要把各个硬件系统集成起来以实现实时通信,并反复调试,以确保整套系统的稳定性和安全性。
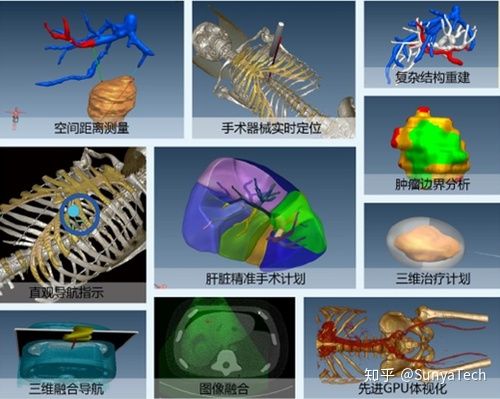
(手术机器人软件功能)
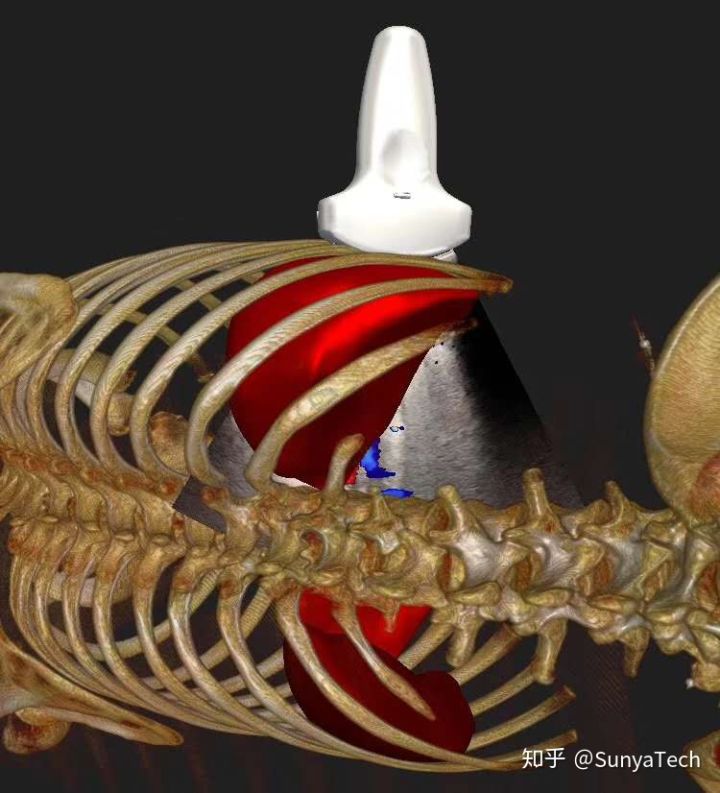
多模态影像融合导航)
以上大致可以实现一个手术机器人的基本功能,如果要实现一些复杂的高级功能则远远不够。比如AI医疗,这需要软件算法具备三维图像自动分割、自动配准、图像识别等高级功能,对研发团队的技术实力要求很高。如果需要实现远程医疗,即机器人遥操作,则除了以上提到的硬件外,还需要配备一台力反馈设备(如视频中演示)。
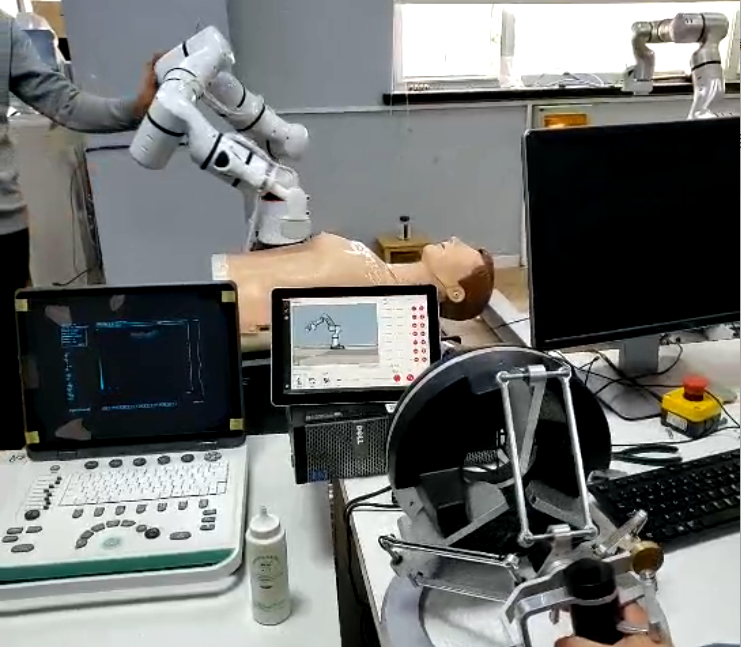
(机器人远程医疗)
总体来说,手术机器人技术方兴未艾,以上所提到的仅仅是现有阶段的情况描述,随着技术的发展和越来越多科研团队的介入,相信进入临床辅助医生、造福患者已不再遥远。
舜若科技原创,转载请注明出处

相关推荐
“asean”的以太网测试视频
数显高灵敏度FM调频立体声前端的制作
单频输入窄带调频的实用见解
专家锦囊丨不使用变压器能否将100伏以上的可用电压直接转换为更低的输出电压?
uCosII中文版电子书
西门子S7-200仿真软件
“hanshuyujifen2”的按键中断和按键输入视频
理解级联系统的三阶截断点
西门子S7-200中文手册(中文)
永宏PLC FBS操作手册-进阶应用篇
西门子PLC中文仿真器
uCos中文电子版书(2)
共源 JFET 放大器
放大器失真
“hanshuyujifen2”的uCGUI移植成功演示视频
三十岁的人是什么样的?[转帖]
用收发、编解码模块的无线抢答器电路
永宏PLC FBS系列操作手册-硬体篇、指令篇
IDC:“IT前沿”早知道
创造历史,芯和半导体成为首家获得工博会CIIF大奖的国产EDA
专家锦囊丨GMSL解析:像素模式和隧道模式如何增强系统性能
模拟芯视界 | 汽车系统中无 TVS 的反向电池保护系统设计
用打火机外壳制作无线话筒电路
seasoblue,水中鱼,特大好消息!!!
“hanshuyujifen2 ”的串口控制输出方波频率视频
泛华测控左毅畅谈军用测试需求
自制教学用调频无线话筒电路
工业机器人正迎来“慧眼”与“大脑”的觉醒,进入加速落地期
用调幅立体声频道变换器改装无线影音系统电路
Gao 公布新FTP地址