改进峰值电流模式控制

作者: Terry Allinder 德州仪器
文章转自德州仪器在线技术支持社区,原文地址:
http://www.deyisupport.com/blog/b/power_house/archive/2013/08/30/51493.aspx
最糟糕的设计方案通常会在最低输入电压下产生最大输出功率。而在现实情况中,高输入线路的最大功率可能是最低输入线路电压所输送功率的两倍。这会迫使电源设计人员必须对功率级进行过量设计。本文将探讨输入功率增加的原因以及降低方法。此外,还将介绍一种可提升峰值电流模式控制性能的创新方法。
反向转换器变压器基本上由两个耦合电感器组成。当主开关接通期间,电能被储存在主耦合电感器中。由于变压器具有一次绕组和二次绕组配置,因而当主开关接通时,输出二极管 (D1) 会被反向偏置(图 1a–1b)。当主开关断开时,会将储存在主耦合电感器中的电能传送到输出耦合电感器中,作为驱动负载的能量。反向变压器能对输出电压进行升压或降压转换,并提供输入到输出的隔离。
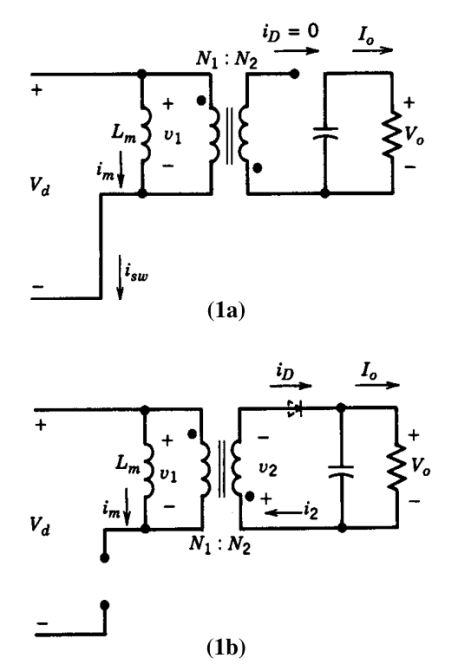
图 1.1a) 主耦合电感器中存储的电能;1b)电能传送至二次绕组
峰值电流模式控制
出于对成本和简约性的考虑,反向转换器通用采用峰值电流模式控制,因而不能直接测量输出电流。当反向转换器出现过载故障时,输出电压就会下降。这样,反馈补偿电压就会升高至脉宽调制 (PWM) 控制器限流阀值之上,而且 PWM 会在逐脉冲过限流限制 (pulse-by-pulse current limit) 模式下运行,这时反馈电压不再控制 PWM 占空比。当峰值主电流超过 PWM 控制器限流比较器电压参考值 (VCS) 时,终止占空比。
峰值电流模式控制面临的挑战
当控制器处于逐脉冲过限流限制模式下时,主开关无法即时关闭。在 PWM 和功率级内存在传播延迟,其中包括控制器的前沿消隐 (LEB),在限流比较器、逻辑电路、栅极驱动器中的传播延迟,以及功率 MOSFET 的关闭延迟。传播延迟会导致峰值主电流因过冲而高于预期值。
方程式 1 计算实际峰值主电流:
 (1)
(1)
计算出峰值主电流后,我们可用方程式 2 来计算输入功率:
 (2)
(2)
这些传播延迟可以长达数百纳秒。我们能使用方程式 3 来计算主电流的斜率,其中 VIN 为整流直流线路电压,LP 为变压器的初级电感,dt 为总传播延迟。
 (3)
(3)
若传播延迟 (方程式 3中的 dt)保持不变,那么当 VIN 增大时,主电流斜率也会相应增大。由于存在传播延迟,最大 VIN 下的峰值电流会因过冲而高于最小 VIN 下的峰值电流(图 2)。
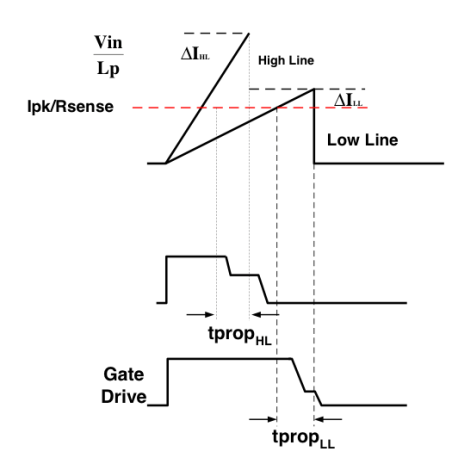
图 2.传播延迟与 VIN 的关系
结果是输入和输出功率随着输入线路电压的增大而增大。可举例说明这一问题。峰值主电流(方程式 4)能根据如下系统要求得出:
 (4)
(4)
对于峰值电流模式控制,我们能在计算峰值电流后确定电流感应电阻值大小(方程式 5)。
 (5)
(5)
VCS 为 PWM 限流比较器电压参考 (0.5V)。最小输入电压下的峰值电流过冲是:
在最大输入线路电压下,峰值电流是(方程式 6):
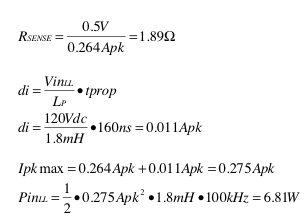 (6)
(6)
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
ATX电源的重要地位
场输出电路:TA8403
智能迎宾机器人的设计与实现
微星通过全新MEG X870E Unify-X Max主板释放AMD CPU的全部性能——AM5配备了高端锐龙超频
Atmel AT91RM9200开发版1320元
ARM9系列产品
大众Gen.Urban无人驾驶测试骡子启动德国公路试验
场输出电路:TA8445K
Arm发布20项技术预测:洞见2026年及未来发展趋势
ARM9系列产品
场输出电路:TA8427
IDC FutureScape 2026十大预测:中国企业如何在AI决策窗口中抢占先机
基于P89LPC932A1的酒后驾车检测控制系统
Atmel AT91RM9200开发版1320元
BD-13型转子一点接地保护
为机器装上更精准的“眼睛”:森云智能视觉硬件接入世强硬创生态
Bootloader的研究与实现
圣邦微电子三通道电源监控芯片 SGM842
步行机器人的设计与实现
场输出电路:TDA3654
BY-21型复合电压继电器
B2405S开关电源
AMD考虑并设计Yottascale AI计算
场输出电路:TDA8354Q
[求助]请大侠指点迷津!!!
Lucid、Uber和Nuro在CES上共同发布“全球机器人出租车”系列
基于Zigbee思想的人体脉搏波监控网络
氮化镓上车进行时:从器件特性到系统效率的全面验证
基于LPC2387微控制器的移动远程家具监控与家电设备控制
芯旺微电子底盘制动专用芯片 SMC6008AF