- 着重分析了两轮自平衡小车的设计原理与控制算法,采用卡尔曼滤波算法融合陀螺仪与加速度计信号,得到系统姿态倾角与角速度最优估计值,通过双闭环数字PID 算法实现系统的自平衡控制。设计了以MPU-6050传感器为姿态感知的两轮自平衡小车系统,选用8位单片机HT66FU50A为控制核心处理器,完成对传感器信号的采集处理、车身控制以及人机交互的设计,实现小车自主控制平衡状态、运行速度以及转向角度大小等功能。
- 关键字:
两轮自平衡 姿态检测 卡尔曼滤波 数据融合 PID 控制器 201603
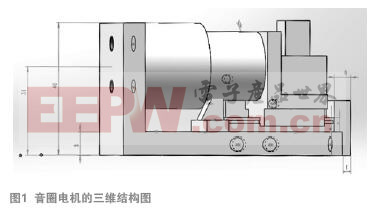
- 为满足一类音圈直流伺服电机的高速振动定位精度工作的精度需求,研发了一种高性能的音圈电机高精度位置定位设备。基于ARMCortex M3系列的STM32F103VCT6处理器设计了音圈直流伺服电机控制系统。分析了该伺服系统结构的组成,研究结果表明:设计的高精度位置伺服系统,能满足位置超调量小于10 counts,稳态调整误差为土1 count的系统参数指标。实现了音圈电机高速振动下控制器对光栅传感器实时采集并且高速处理,以及对音圈电机位置的快速调整,完成对音圈电机的高速振动定位精度的控制。
- 关键字:
音圈电机 伺服控制 PID PWM 201601
- 1. PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1,
2. 一看二调多分析,调节质量不会低
3. PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:温度T: P=20~60%,T=180~600s,D=3-1
- 关键字:
PID

- 导读:本文主要讲述的是控制器的原理,感兴趣的童鞋们快来学习一下吧~~~很涨姿势的哦~~~
1.控制器原理--简介
控制器,英文名称为controller,是机器的核心。其标准定义为:按照预定顺序改变主电路或控制电路的接线和改变电路中电阻值来控制电动机的启动、调速、制动和反向的主令装置。主要是由程序计数器、指令寄存器、指令译码器、时序产生器以及操作控制器组成的,它是发布命令的“决策机构”,即完成协调和指挥整个计算机系统的操作。
2.控制器原理--分类
控制器可
- 关键字:
控制器 PID 控制器原理

- 导读:本文主要讲述的是PID控制器原理,有兴趣的盆友们快来学习一下吧~~~很涨姿势的哦~~~
1.PID控制器原理--简介
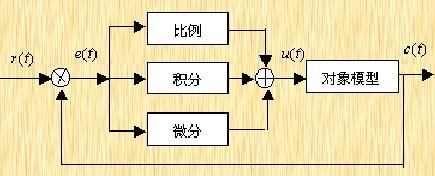
PID控制器,Proportion Integration Differentiation,即比例-积分-微分控制器。它主要是通过对Kp,Ki以及Kd三个参数的设定,用于对基本线性和动态特性不随时间变化系统的控制。PID控制器是根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。不同的控制规律适用于不同的生产过程,必须合理选择相应的
- 关键字:
PID PID控制器原理
- “伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
基于VB的伺服驱动器串口通信的实现
本文即针对德国博世力士乐的伺服驱动器indradrive,采用灵活易用的VB6.
- 关键字:
MATLAB PID
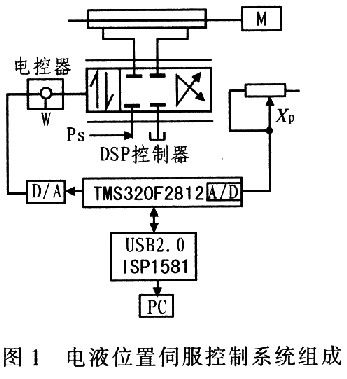
- 在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结
- 关键字:
DSP NNC-PID
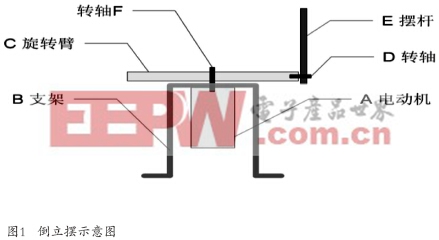
- 1 简易旋转倒立摆及控制装置及其功能要求
设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图1所示。电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转。摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
1.2 基本要求
(1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;
(2)从摆杆
- 关键字:
ARM 单片机 PWM PID 旋转臂
- 电压调节模块(Voltage Regulator Module,VRM)具有低压大电流输出、快速负载变化响应、高输出稳定度等特点,主要应用于CPU等对供电电源有特殊要求的集成电路芯片的供电。然而随着集成电路技术的迅速发展,晶体管体积迅速减小、单芯片晶体管数迅速增加。这样的半导体制造技术发展趋势已经使得集成电路芯片的供电电压越来越低,负载电流越来越大,负载变化速度越来越快、幅度越来越大。集成电路芯片这样的越来越严酷的供电要求需要VRM的性能有新的提升。同时性能的提升需要传统控制方法有新的发展和变化。
- 关键字:
PID UC1842

- 导读:当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。反馈的要素包括三个部分:测量、比较和执行。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制原理——分类
开环控制
开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输入没有影响。在这种控制系统中,不依赖将被控量返送回来以形成任何闭环回路。
闭环控制
- 关键字:
PID PID控制原理

- 1 引言
交流电动机伺服驱动系统由于其结构简单、易于维护的优点逐渐成为现代产业的基础。其中交流伺服系统在机器人与操作机械手的关节驱动以及精密数控机床等方面得到越来越广泛的应用。交流伺服系统由交流电动机组成,交流电动机的数字模型不是简单的线性模型,而具有非线性、时变、耦合等特点,用传统的基于对象模型的控制方法难以进行有效的控制。对于交流伺服系统的性能,一方面要求快速跟踪性能好,即要求系统对输入信号的响应快,跟踪误差小,过渡时间短,且无超调或超调小,振荡次数少。另一方面,要求稳态精度高,即系统稳态误
- 关键字:
PID 伺服系统
- 引言
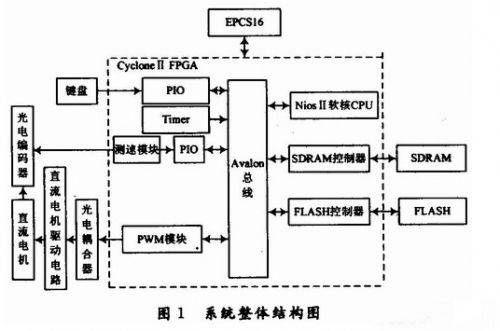
以往的直流电机调速系统通常采用单片机或DSP进行控制,而单片机需要使用大量的外围电路,且系统的可升级性差,如更换控制器,往往要对整个软硬件进行重新设计,可重用性不高。而采用DSP作为主要控制器,如果碰到处理多任务系统时,一片DSP不能胜任,这时就需要再扩展一片DSP或者FPGA芯片来辅助控制,从而实行双芯片控制模式。但这样做,既增加了两个处理器之间同步和通信的负担,又使系统实时性变坏,延长系统开发时间。基于以上此类问题,本文提出了采用Altera公司推出的NiosⅡ软核来控制直流电机调速系
- 关键字:
DSP PID
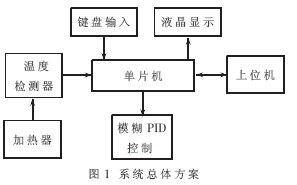
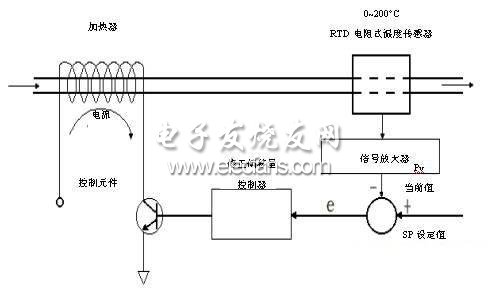
- 温度是工业生产过程中重要的物理量,尤其在冶金、机械、食品、化工等工业中,对工件的处理温度都要求严格控制,对温度的精确度和稳定性均有较高要求,温度的测量与控制直接关系到企业的生产利益甚至存亡。
目前在国内外很多温度控制系统都采用ARM 作为处理器,PID 作为温度控制方式[1]。该控制方式对大多数控制对象均可达到满意的控制效果,但对于有特殊要求或具有复杂对象特性的系统,采用数字PID控制一般难以达到目的。基于温度变化的非线性与模糊控制鲁棒性强、干扰和参数变化对控制效果的影响较小,尤其适合于非线性、
- 关键字:
单片机 PID
- 引言
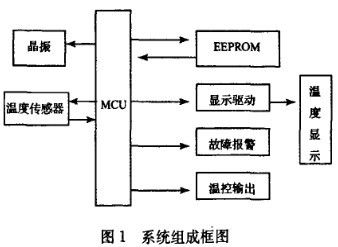
婴儿培养箱主要应用于早产儿、低体重儿、病危儿或发育不良的新生儿的临床医疗。在儿科的医疗护理中占有重要地位,是医院不可或缺的医疗器械[1][2]。由于此类婴儿的特殊性,所以婴儿培养箱对控制精度、稳定性能和安全性都有较高要求。现今市场上的婴儿培养箱大多采用传统的PID算法。常规PID算法是过程控制中应用最为广泛的一种基本控制规律,具有稳定性高、鲁棒性好等优点。但其对时变非线性系统来说控制就难以达到很好的效果。本文采用模糊PID算法对婴儿培养箱的温度加以控制,系统的动静态特性得到进一步改善。
- 关键字:
PID MSP430
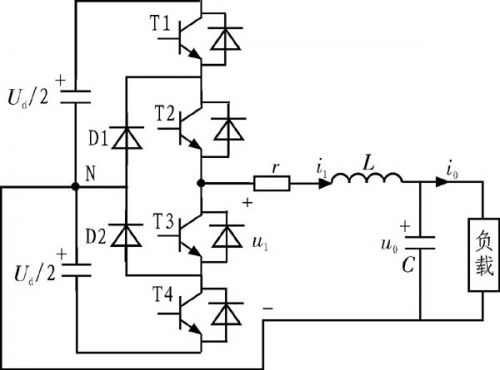
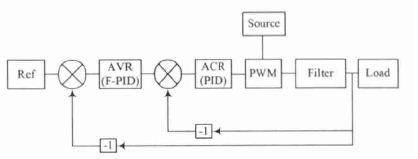
- 随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。在这些指标中对输出电压的THD要求比较高,对于三相逆变器,一般要求阻性负载满载时THD小于2%,非线性满载(整流性负载)的THD小于5%.这些指标与逆变器的控制策略息息相关。文中
- 关键字:
SPWM PID Simulink
fuzzy-pid介绍
您好,目前还没有人创建词条fuzzy-pid!
欢迎您创建该词条,阐述对fuzzy-pid的理解,并与今后在此搜索fuzzy-pid的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473