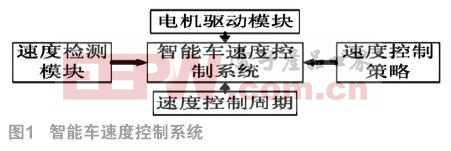
本文重点介绍了基于光电自动寻线智能车的速度控制系统的设计,包含直流电机的驱动模块、速度检测模块、速度控制策略、速度控制周期等部分。采用两片MC33886芯片来驱动电机运行,用反射式红外对管检测电机速度,实现对电机的闭环控制,通过大量的试验,最终速度控制策略采用了增量式PID控制和BangBang控制相结合的方法,并创新性地使用两个中断相结合的方法使得速度控制周期为等时的,从而对智能车过弯速度达到良好的控制。
关键字:
速度控制 增量式 PID 控制 BangBang 控制 控制周期 201709
开发过USB设备驱动的朋友,不知有没有碰到过下面的问题:如果你的设备驱动程序没有经过数字签名,那么,在XP系统下,你在每个USB口上第一次插上你的USB设备时,系统都会要求你装一次驱动程序。这种感觉是很不好的。我们希望能像大多数USB移动盘一样,插上设备就自动安装驱动,然后就可以对设备进行访问了。
关键字:
PID VID
本设计智能传感器节点完成如下任务:1、具有多种传感器输入接口(如检测环境温度、湿度、光照等参数);2、同时实现多路传感器的信号采集;3、节点具有网络接口,可以以网页的形式远程登录节点,对节点进行观测;4、可以实现节点参数的设定,如传感器校准、标度变换、冗余传感器切换等;5、可以实现某些控制功能,输出信号为电压、电流、、PWM
关键字:
智能传感器节点 信号采集 PID AT32UC3A AVR32
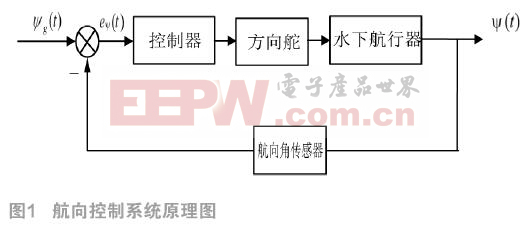
水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器,在MATLAB SIMULINK环境下搭建了航向控制仿真系统,数值仿真结果表明,滑模变结构控制器对于不同航行条件具有较强的适应性,同时,航向的控制效果明显优于PID控制器。
关键字:
水下航行器 滑模变结构控制 PID 定向控制 20170203
小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置
关键字:
PID
自适应神经模糊推理系统(ANFIS)依据模糊逻辑和神经元的知识,而常规的模糊控制系统是一个不能自动地将专家经验知识转化为推理规则库,同时缺乏有效的方法改进隶属度函数。该系统使用最小二乘法和反向传播的混合算法来调整条件参数和结论参数,并且能够根据系统本身自动产生模糊规则。根据以上内容本文采用了ANFIS,并将其应用到LED温湿度环境的控制中。结果表明:相比于常规的PID控制,该方法能够较好的提高温湿度控制系统的动态稳定性和抗干扰性。
关键字:
ANFIS 减法聚类 温湿度控制系统 PID
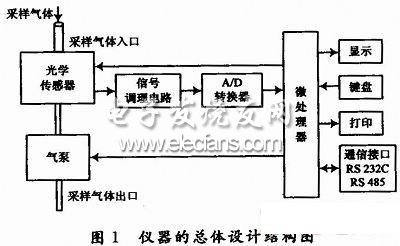
摘要:气味源的循迹是目前的研究热点之一,在以后的日常生活以及生产方面有着较为广泛的运用。本文介绍了一种基于 STC12C5A60S2单片机设计的简便智能气味循迹小车。采用两个气味传感器,根据浓度差判断气味流向,并
关键字:
单片机 PID 气味 循迹小车
针对中央空调系统存在非线性、不确定性和干扰性等问题,提出了利用MATLAB实现模糊自适应PID控制,并对系统进行了编程仿真实验。仿真结果表明,将该方法应用在中央空调系统中是可行的,但是MATLAB不能与现场设备进行
关键字:
空调 模糊 自适应 PID PLC
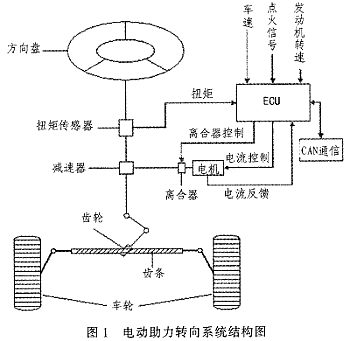
转向系统是汽车的重要组成部分,其性能直接影响着汽车行驶的稳定性和安全性。早期的汽车转向系统为纯机械转向系统,没有助力,转向动力完全由驾驶员提供,驾驶体验差。从上世纪30年代以后,逐渐出现了助力转向系统。目前,汽车助力转向主要有3种形式:液压助力转向系统(Hydraulic Power Steering,HPS),电控式液压助力转向系统(Electric Hydraulic Power Steeing,EHPS)以及电动助力转向系统(Electric Power Steering System,EPS)
关键字:
EPS PID
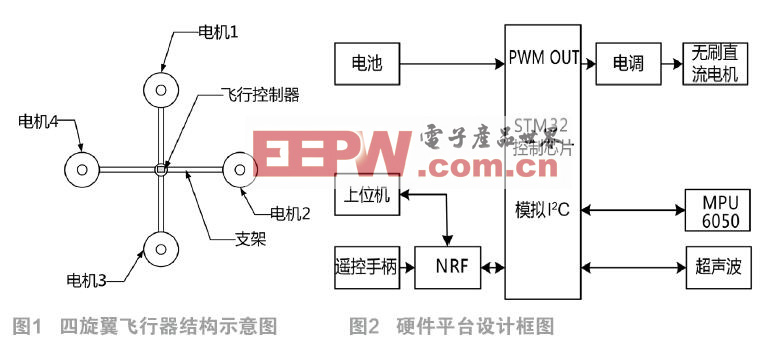
本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,该控制系统能够稳定可靠运行,具有较强的鲁棒性。
关键字:
四旋翼飞行器 卡尔曼滤波 PID 鲁棒性 201610
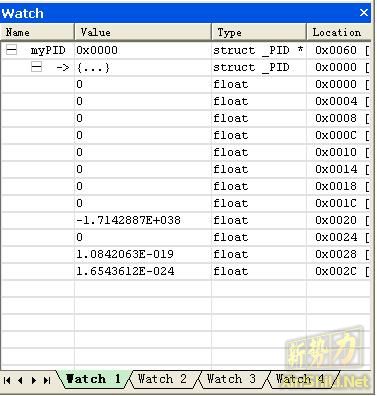
最近由于有些时间,于是想起了做一个PID设计,在网上收集了不少关于PID控制的理论,于是计划用mega16L做一个PID测试程序,发现一些意想不到的误差,不知各位同仁是否有遇到与我的类似的现象:我定义了一个PID结构体,在初始化的时候无法把每个元素的初始化值设置为0(见下面的仿真图),而且,PID结构体中的部分参数是应该不变的,在整个PID运算中,但是不应该变化的参数却在PID运算发生了变化,不知道是什么原因,到现在也无法查出原因。有兴趣的朋友可以一起参与讨论或有经验的朋友 给与相关帮助,谢谢!
关键字:
AVR PID
1 前 言
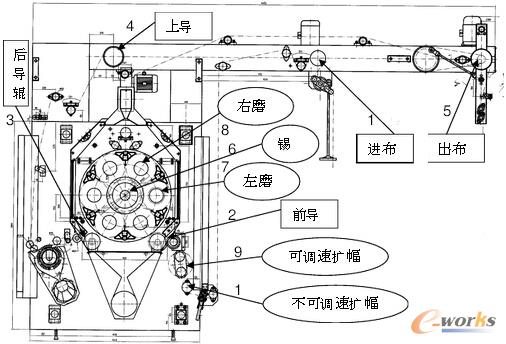
目前国内外染整设备技术发展总的趋势是向环保、绿色、节能、低耗、高效、智能化方向发展。磨毛整理机的发展仅有几十年的历史。以德国、意大利为主的一些高档超柔软磨毛整理机诞生于上世纪90年代,到今天已经形成了广泛应用计算机控制等高新技术的发展趋势。随着电子技术的迅猛发展,国内磨毛机技术的进步也相当的快,新一代磨毛机研发于21世纪初,但到目前为止其技术水平和国际最先进磨毛机尚有一定差距 。国内外磨毛机产品的技术现状对比分析如表1.1所示。
织物的张力 是织物与磨毛辊接触松紧度的表现。在磨
关键字:
PCC PID
在一些系统中,需要进行PID控制,如一些板卡采集系统,甚至在一些DCS和PLC的系统中有时要扩充系统的PID控制回路,而由于系统硬件和回路的限制需要在计算机上增加PID控制回路。在紫金桥系统中,实时数据库提供了PID控制点可以满足PID控制的需要。
进入到实时数据库组态,新建点时选择PID控制点。紫金桥提供的PID控制可以提供理想微分、微分先行、实际微分等多种控制方式。
进行PID控制时,可以把PID的PV连接在实际的测量值上,OP连接在PID实际的输出值上。这样,在实时数据库运行时,就可
关键字:
PID PLC
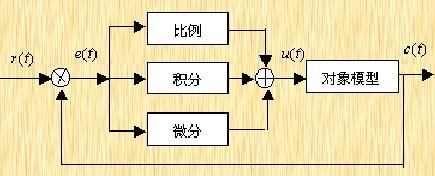
1.PID是闭环控制算法
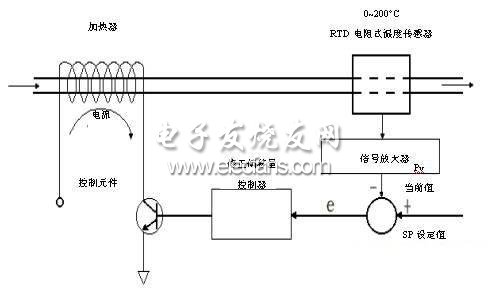
因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
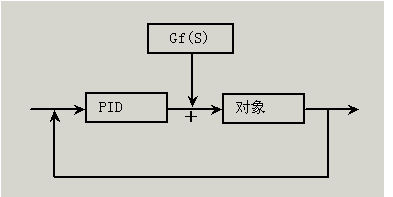
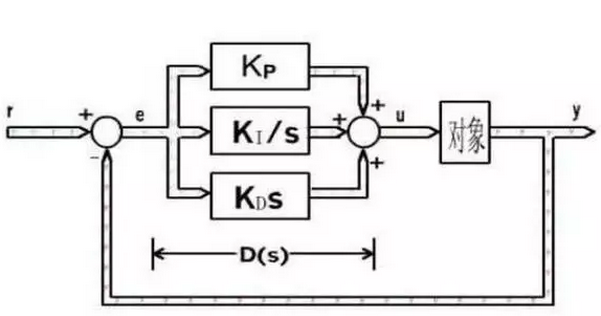
2.PID是比例(P)、积分(I)、微分(D)控制算法
但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的
关键字:
PID 控制算法
fuzzy-pid介绍
您好,目前还没有人创建词条fuzzy-pid!
欢迎您创建该词条,阐述对fuzzy-pid的理解,并与今后在此搜索fuzzy-pid的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473