引言
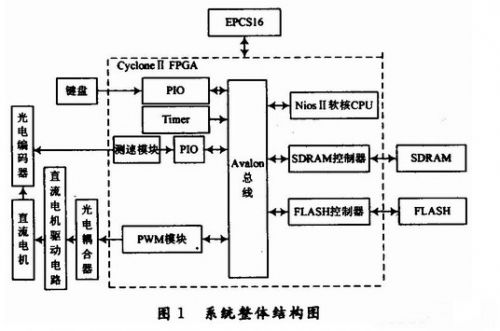
以往的直流电机调速系统通常采用单片机或DSP进行控制,而单片机需要使用大量的外围电路,且系统的可升级性差,如更换控制器,往往要对整个软硬件进行重新设计,可重用性不高。而采用DSP作为主要控制器,如果碰到处理多任务系统时,一片DSP不能胜任,这时就需要再扩展一片DSP或者FPGA芯片来辅助控制,从而实行双芯片控制模式。但这样做,既增加了两个处理器之间同步和通信的负担,又使系统实时性变坏,延长系统开发时间。基于以上此类问题,本文提出了采用Altera公司推出的NiosⅡ软核来控制直流电机调速系
关键字:
PID NiosⅡ FPGA
系统以FPGA为核心,通过对正弦信号进行滤波、放大整形后得到标准的方波,由FPGA对其频率、周期及相位差进行测量。频率、周期测量采用等精度测量法,其具有精度高的特点;相位差测量采用鉴相器分辨出相位差后测量其高电平所占比例测量。摒弃传统的FPGA+单片机方案,利用SOPC Builder在FPGA上构建Nios Ⅱ处理器对测量的数据进行数据处理及显示,实现了频率、周期、相位差测量的片上系统(SOPC),提高了系统的稳定性、降低了布线难度。
基于Nios_处理器的多功能计数器系统设计.pdf
关键字:
NiosⅡ 多功能计数器 FPGA
自2005年9月LXI总线推出以来,已经显示出其组建测试系统的众多优点。基于LXI总线组建测试系统具有易于使用、灵活性高、模块化和可扩缩性、实现更快的系统吞吐率、可分布式应用、长寿命、低成本、通过IEEE1588时钟同步、机架空间小、合成仪器等诸多优点。
1553B总线的全名为“时分制指令/响应式多路传输数据总线”,国内多型战斗机、军舰等武器平台都采用其作为传输总线。因此研制基于LXI总线的1553B通讯模块,不仅能满足多型武器装备对1553B总线的测试需求,也对LXI总
关键字:
NiosⅡ 1553B FPGA
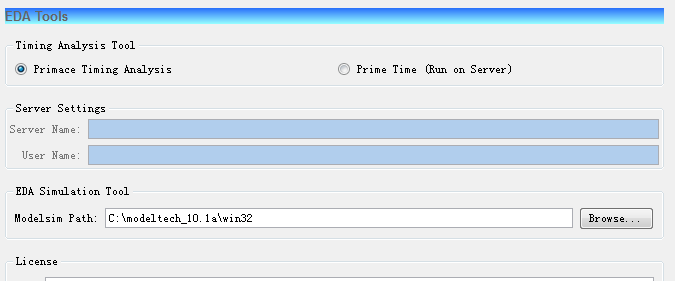
京微雅格是世界上除美国硅谷以外唯一自主研发并成功量产现场可编程逻辑(FPGA)芯片的公司,目前拥有数百项技术专利和近百款产品。目前,已经有越来越多的用户都开始使用国产FPGA来做自己的设计,然而在FPGA的开发过程中,免不了要对设计进行仿真。京微雅格的FPGA是支持在modelsim中进行仿真的。
京微雅格的FPGA需要在Primace软件中进行开发,为了便于客户进行仿真设计,在Primace5.0及以上版本都支持在工程中直接调用仿真工具Modelsim。同时,也支持在modelsim中直接进行
关键字:
京微雅格 FPGA 仿真
自20世纪40年代中期诞生以来,微波炉从无到有,用于商业,60年代,进入家庭并迅速普及,其基本功能与操作并未发生较大改变。实际上,其体现的唯一主要优势就是用户体验得到不断改善,能够包含越来越多的功能。
而如今,微波炉已经像洗衣机一样成了家庭的基本家用电器,入住千家万户。许多人只熟悉它的功能,享受给人们带来方便的同时,有多少人去反问它的所以然的了?即便你是一位电子达人,也有你不知道的…
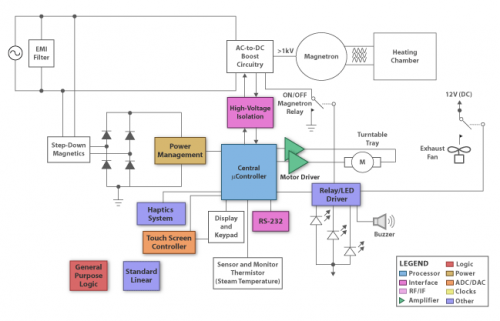
微波炉框图:
电源管理系统
PWM电源控制器
关键字:
微波炉 DC/DC PWM
Spartan-3 FPGA能以突破性的价位点实现嵌入式DSP功能。本文阐述了Spartan-3 FPGA针对DSP而优化的特性,并通过实现示例分析了它们在性能和成本上的优势。
所有低成本的FPGA都以颇具吸引力的价格提供基本的逻辑性能,并能满足广泛的多用途设计需求。然而,当考虑在FPGA构造中嵌入DSP功能时,必须选择高端FPGA以获得诸如嵌入式乘法器和分布式存储器等平台特性。
Spartan-3 FPGA的面世改变了嵌入式DSP的应用前景。虽然Spartan-3系列器件的价位可能较低,
关键字:
赛灵思 FPGA Spartan-3
横跨多重电子应用领域、全球领先的半导体供应商意法半导体(STMicroelectronics,简称ST)宣布对基于射线跟踪 (ray-tracing) 技术的实验性3D图形应用系统进行测试验证。该解决方案采用一颗与现场可编程门阵列 (FPGA, Field-Programmable Gate Array) 相连、基于ARM®处理器的测试芯片。FASTER 研发项目以“简化分析合成技术,实现有效配置”为目标,是意法半导体与米兰理工大学 (Politecnico di Mi
关键字:
意法半导体 FPGA GPU
一、Altera Quartus II 11.0套件介绍
所谓巧妇难为无米之炊,再强的软硬件功底,再多的思维创造力,没有软件的平台,也只是徒劳。因此,一切创造的平台——Quartus II 软件安装,由零开启的世界,便从此开始。
自从Bingo 2009年开始接触FPGA,Quartus II 版本的软件从n年前的5.1版本到今天的最新发布的11.0,都使用过;当然对于软件核心构架而言,万变不离其宗。虽然多多少少有点bug,但这10多个版本发展到了现在,能看到Alt
关键字:
FPGA Quartus II
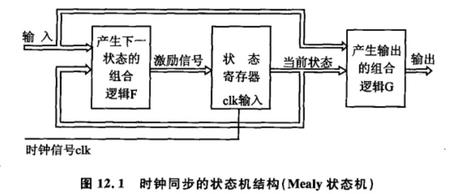
今天我们来写状态机。
关于状态机呢,想必大家应该都接触过,通俗的讲就是数电里我们学的状态转换图。状态机分为两中类型,一种叫Mealy型,一种叫Moore型。前者就是说时序逻辑的输出不仅取决于当前的状态,还取决于输入,而后者就是时序逻辑的输出仅仅取决于当前的状态。下面两个图分别表示两种不同的状态机。
下面我们就通过代码来写一下状态机,以下面的状态转换图为例
首先,是一种典型的状态机写法,这种写法我们称为
关键字:
FPGA 状态机 Mealy Moore
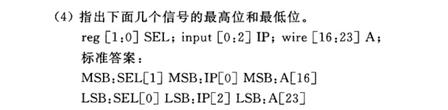
习题呢,来自夏雨闻老师的那本教材,就挑几个感觉自己做着有点难度的写写吧
这个题呢刚开始我是没看明白,记得书上只讲了我们习惯上的用法,这种用法我是没见过,问了下别人才知道,Verilog中一般是左高右低。第一个没问题,第二个,input [0:2] IP,习惯上我们这样写 input [2:0] IP,这里两个是等价的,即表示第0 .1 .2 三位。第三个,wire [16:23] A,也是,左高右低,表示第16.17.....22. 23位,左高右低就这样记就好了。
关键字:
FPGA 夏雨闻 寄存器
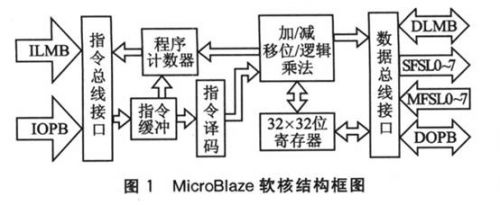
Xilinx公司的MicroBlaze 32位软处理器核是支持CoreConnect总线的标准外设集合。MicroBlaze处理器运行在150MHz时钟下,可提供125 D-MIPS的性能,非常适合设计针对网络、电信、数据通信和消费市场的复杂嵌入式系统。
1 MicroBlaze的体系结构
MicroBlaze 是基于Xilinx公司FPGA的微处理器IP核,和其它外设IP核一起,可以完成可编程系统芯片(SOPC)的设计。MicroBlaze 处理器采用RISC架构和哈佛结构的32位指令和
关键字:
MicroBlaze Xilinx FPGA
1 引言
由于Internet技术的渗透,嵌入式系统正变得越来越智能化并具有越来越多的网络友好特性。Web技术的飞速发展,给嵌入式系统进入Internet提供绝佳的途径。在现场仪表和企业设备层应用嵌入式技术是企业监控系统的发展趋势。与现场总线技术相比,嵌入式技术不仅为开发者提供了大量的工具和函数库,而且减少了传统的客户端,减少了二次开发的工作量;而把嵌入式技术和Internet技术结合起来,使得整个工控网络易于和Internet实现无缝连接;现在多数企业控制网络是通过专用线路进行数据通信,其通信
关键字:
MicroBlaze Xilinx FPGA
1 MicroBlaze的体系结构
MicroBlaze采用功能强大的32位流水线结构,包含32个32位通用寄存器和1个可选的32位移位器,时钟频率可达150 MHz;在Virrex一4 FPGA上运行速率高达120 DMIPS,仅占用Virtex—II Pro FPGA中的950个逻辑单元。MicroBlaze软核的结构框图如图1所示。它具有以下基本特征:
①32个32位通用寄存器和2个专用寄存器(程序计数器和状态标志寄存器)。
②32位指令系统,支持3个操作数和2种寻
关键字:
MicroBlaze GPIO FPGA
引 言
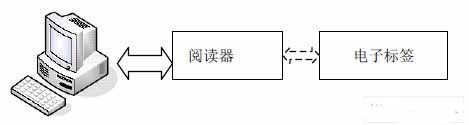
RFID 技术是从 20 世纪 80 年代走向成熟的一项自动识别技术,近年来发展十分迅速。 目前,在全世界,基于 RFID 技术的电子标签,使用已经 非常广泛了,这主要取决于它的特性,RFID 标签可以使用在几乎所有的物理对象上。RFID 技术在 工业自动化,物体跟踪,交通运输控制管理,防伪校园卡,电子钱包,行李标签,收费系统,医用装 置,电子物品的监控和军事用途等方面已经得到了广泛的应用。例如第二代居民身份证,使用基于 ISO/IEC4443-B 标准的 13.56 MHz 电子标签,
关键字:
Microblaze RFID阅读器 FPGA FIFO
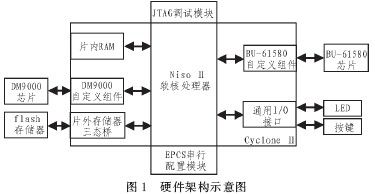
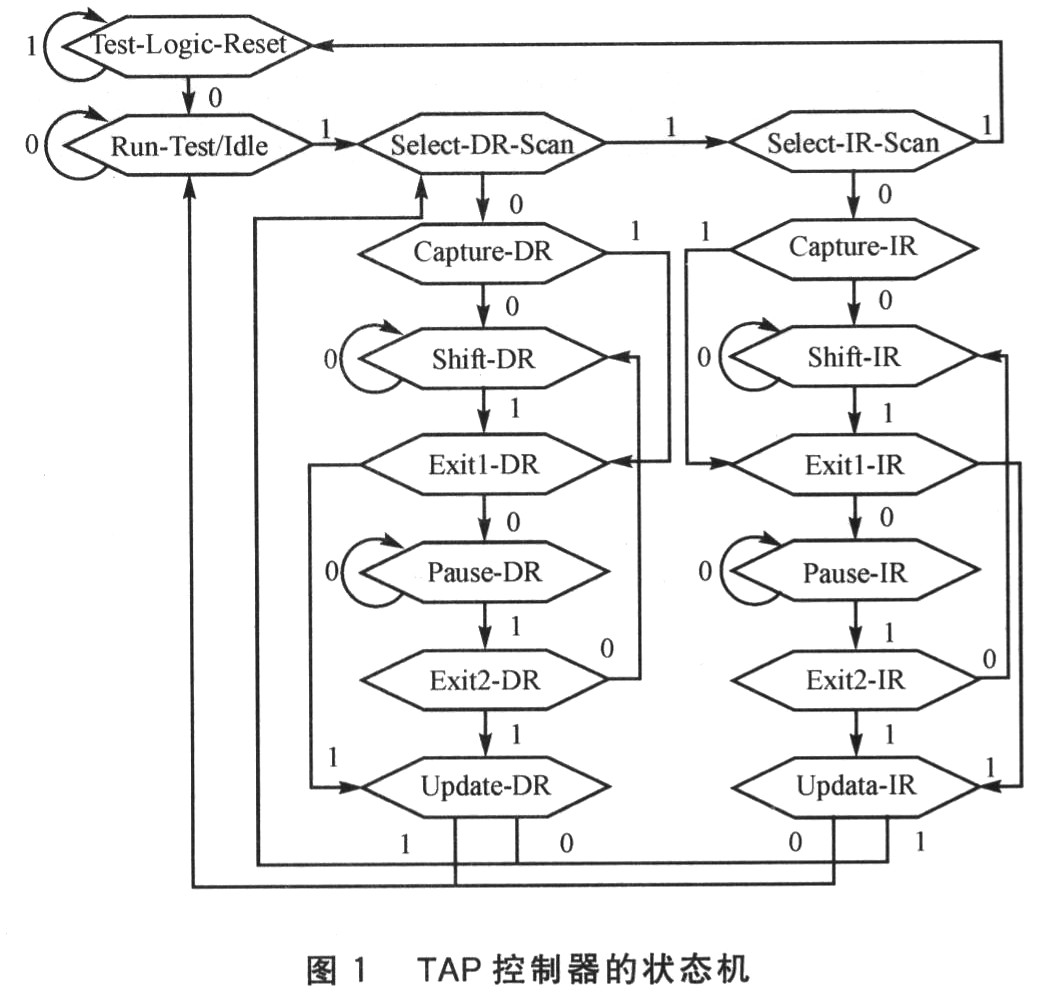
SOPC技术的发展,给仿真器指出了新的发展方向。所谓SOPC技术,就是指用可编程技术将整个系统放在一块硅片上。在传统设计中电路级相互独立的各个系统被集成到一块FPGA芯片中。
SOPC的可重用性是一种先进的设计思想。为了降低用户的负担,避免重复劳动,将一些在数字电路中常用但比较复杂的功能模块,比如SDRAM控制器等,设计成可修改参数的模块,用户在设计系统时可以直接调用这些模块。这些特定的功能模块被称为IPcore(知识产权核)。由于IPcore通常是很成熟的,因此降低了开发风险。
本文利用
关键字:
SOPC JTAG FPGA
fpga-pwm介绍
您好,目前还没有人创建词条fpga-pwm!
欢迎您创建该词条,阐述对fpga-pwm的理解,并与今后在此搜索fpga-pwm的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473