
- 一、VGA的诱惑
首先,VGA的驱动,这事,一般的单片机是办不到的;由于FPGA的速度,以及并行的优势,加上可现场配置的优势,VGA的配置,只有俺们FPGA可以胜任,也只有FPGA可以随心所欲地配置(当然ARM也可以,应用比较高吧)。
初学者就是喜欢看炫的效果,往往会忍不住想玩。尤其玩FPGA的,没玩VGA就感到跟单片机没啥提升,因此VGA的驱动也不得不讲。Bingo当年也是如此。挡不住VGA的诱惑,初学者问Bingo VGA问题的人也是灰常的多,也许一般教科书理论太强,实际应用不是很身后
- 关键字:
VGA FPGA
- Altera公司今天发布其Stratix® 10 FPGA和SoC体系结构和产品细节,这一下一代高端可编程逻辑器件在性能、集成度、密度和安全特性方面实现全面突破,势必将云时代的网络通信技术推向又一个巅峰。
Stratix 10 FPGA和SoC采用了Altera革命性的HyperFlex™ FPGA架构,由Intel® 14 nm三栅极工艺技术制造,内核性能是前一代FPGA的2倍。业界性能最好、密度最高、具有先进的嵌入式处理功能的FPGA与GPU级别浮点计算性能和异构
- 关键字:
Altera FPGA
- FPGA(Field-Programmable Gate Array),即现场可编程门阵列,它是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物。它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。FPGA的开发相对于传统PC、单片机的开发有很大不同。FPGA以并行运算为主,以硬件描述语言来实现;相比于PC或单片机(无论是冯诺依曼结构还是哈佛结构)的顺序操作有很大区别,也造成了FPGA开发入门较难。目前国内有专
- 关键字:
FPGA A/D
- 射频识别(RFID)技术是一种非接触式的自动识别技术,通过射频信号自动识别目标对象并获取相关信息。通常RFID系统主要由应用软件、射频卡以及读卡器三部分构成[1]。相对于低频段的RFID系统,工作在860 MHz~960 MHz的超高频段(UHF)RFID系统有着读取距离远、阅读速度快等优点,是目前国际上RFID技术发展的热点[2]。读卡器的设计是RFID系统设计中的关键部分,设计方案有很多种。FPGA[3]具有开发简单、静态可重复编程和动态在线编程的特点,已经成为当今应用最广泛的可编程专用集成电路。
- 关键字:
FPGA 读卡器
- 通常来讲,“一个好汉三个帮”,一个完整的嵌入式系统中由单独一个FPGA使用的情况较少。通常由多个器件组合完成,例如由一个FPGA+CPU来构成。通常为一个FPGA+ARM,ARM负责软件配置管理,界面输入外设操作等操作,FPGA负责大数据量运算,可以看做CPU的专用协处理器来使用,也常会用于扩展外部接口。常用的有ARM+FPGA,DSP+FPGA,或者网络处理器+FPGA等种种架构形式,这些架构形式构成整个高速嵌入式设备的处理形态。
不得不说的是,随着技术的进步,现在CP
- 关键字:
ARM FPGA
- 全球领先的蜂窝通信、多媒体和连接性DSP IP平台授权厂商CEVA公司宣布专注开发独特太空应用抗辐射加固ASIC解决方案的无晶圆厂半导体提供商Ramon Chips公司已经获得CEVA-X1643的授权许可,用于其瞄准高性能太空计算的RC64 64核并行处理器。Ramon将在RC64处理器中集成64个CEVA-X1643 DSP,为用于通信、地球观测、科学和其它许多应用的新一代卫星实现计算能力的巨大飞跃。
RC64是65nm CMOS并行处理器,提供384 GOPS、38 GFLOPS和60 G
- 关键字:
CEVA DSP
- 引言
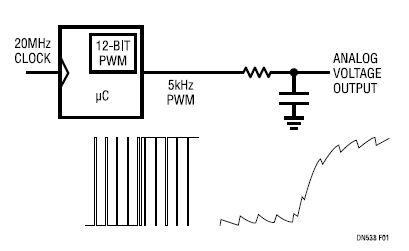
脉宽调制(PWM)是从微控制器或FPGA等数字器件产生模拟电压的一种常用方法。大多数微控制器都具有内置的专用PWM产生外设,而且其仅需几行RTL代码即可从FPGA产生一个PWM信号。如果模拟信号的性能要求不是太严格,那么这就是一种简单和实用的方法,因为它只需要一个输出引脚,而且与具有一个SPI或I2C接口的数模转换器(DAC)相比,其代码开销是非常低。图1示出了一款典型应用,其采用一个经滤波的数字输出引脚来产生一个模拟电压。
该方案的诸多不足之处您不必深究就能发现。理想情况下,一个1
- 关键字:
PWM FPGA
- 1引言
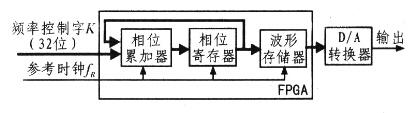
DDS同DSP(数字信号处理)一样,是一项关键的数字化技术。DDS是直接数字式频率合成器(DirectDigitalSynthesizer)的英文缩写。与传统的频率合成器相比,DDS具有低成本、低功耗、高分辨率和快速转换时间等优点,广泛使用在电信与电子仪器领域,是实现设备全数字化的一个关键技术。在各行各业的测试应用中,信号源扮演着极为重要的作用。但信号源具有许多不同的类型,不同类型的信号源在功能和特性上各不相同,分别适用于许多不同的应用。目前,最常见的信号源类型包括任意波形发生器,函数发
- 关键字:
FPGA DDS
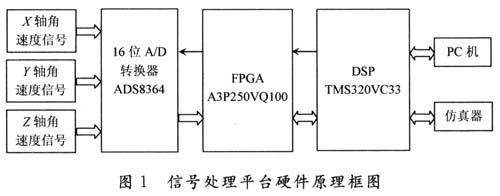
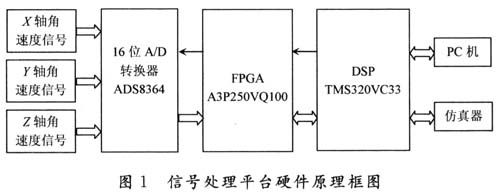
- 陀螺仪是一种能够精确地确定运动物体方位的仪器,它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其他高科技的发展具有十分重要的战略意义。
近年来随着MEMS(微机电系统)技术的发展,MEMS陀螺仪的研究与发展受到了广泛的重视。MEMS陀螺仪具有体积少、重量轻、可靠性好、易于系统集成等优点,应用范围广阔。但是目前MEMS陀螺仪的精度还不是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。
本文选用TI公司的TMS320VC33作为MEMS陀
- 关键字:
DSP MEMS
- 陀螺仪是一种能够精确地确定运动物体方位的仪器,它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其他高科技的发展具有十分重要的战略意义。
近年来随着MEMS(微机电系统)技术的发展,MEMS陀螺仪的研究与发展受到了广泛的重视。MEMS陀螺仪具有体积少、重量轻、可靠性好、易于系统集成等优点,应用范围广阔。但是目前MEMS陀螺仪的精度还不是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。
本文选用TI公司的TMS320VC33作为MEMS陀
- 关键字:
DSP MEMS
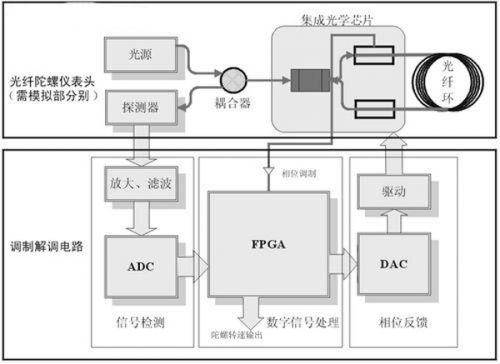
- 光纤陀螺是激光陀螺的一种,是惯性技术和光电子技术紧密结合的产物。它利用Sagnac干涉效应,用光纤构成环形光路,并检测出随光纤环的转动而产生的两路超辐射光束之间的相位差,由此计算出光纤环旋转的角速度。光纤陀螺仪主要由两个部分组成。伺服于表头的调制解调电路根据输进的电信号,经过相应的变换后形成反馈信号送至表头的相位调制器中。在实际的应用过程中,相应的调制解调电路应该根据温度、振动等情况做出相应的改变,才能最大限度地保证陀螺的精度要求。本文设计了一种基于FPGA的测试系统,模拟光纤陀螺仪的表头,并检测调制
- 关键字:
FPGA 陀螺仪
- 引言
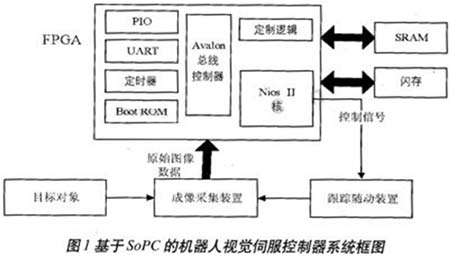
Altera公司的Nios II处理器是可编程逻辑器件的软核处理器。NiosII软核处理器和存储器、I/O接口等外设可嵌入到FPGA中,组成一个可编程单芯片系统(SOPC),大大降低了系统的成本、体积和功耗。适合网络、电信、数据通信、嵌入式和消费市场等各种嵌入式应用场合。
本文提出一个基于Nios II处理器结构的系统用于实现机器人实时运动检测跟踪,使用线性卡尔曼滤波器算法来快速完成运动估计及进一步分析和校正,算法中的乘除利用MATLAB/DSP Builder生成的模块作为Nios
- 关键字:
Nios II FPGA
- 0 引 言
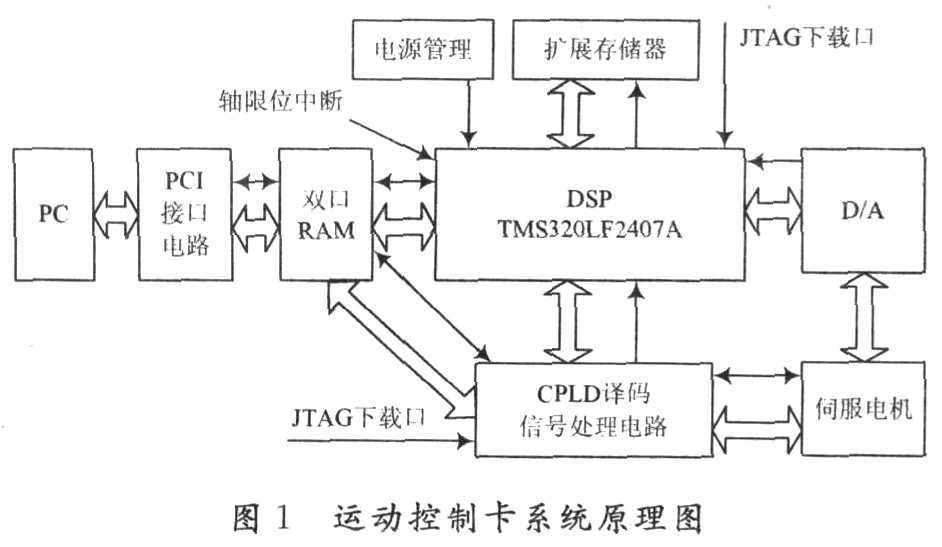
随着先进制造技术的迅速发展,对运动控制的精度要求也越来越高,而运动伺服控制系统的性能很大程度上取决于伺服控制算法,通过运动控制与智能控制的融合,从改进传统的PID控制,到现代的最优控制、自适应控制、智能控制技术,应用先进的智能控制策略达到高质量的运动控制效果,已经成为当前研究的一个热点。
由于运动伺服控制系统中存在负载模型参数的变化,机械摩擦、电机饱和等非线性因素,造成受控对象的非线性和模型不确定性,使得需要依靠精确的数学模型,系统模型参数的常规PID控制很难获得超高精度、快响
- 关键字:
DSP CPLD
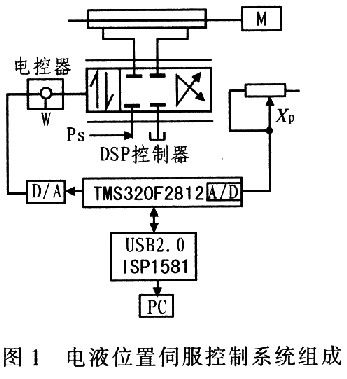
- 在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结
- 关键字:
DSP NNC-PID
dsp+fpga介绍
您好,目前还没有人创建词条dsp+fpga!
欢迎您创建该词条,阐述对dsp+fpga的理解,并与今后在此搜索dsp+fpga的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473




