系统 文章 最新资讯
系统介绍
人们在日常生活、工作中所置身的都是具体的系统,如:交通系统、商业系统、金融系统、工业系统、农业系统、
系统
教育系统、经济系统、文艺系统、军事系统、社会系统等等。可以这样说,人们不能脱离系统而存在。那么什么是一般系统呢?一般系统指的是,我们不去研究某个具体系统的组成、具体结构、具体关系及具体运行过程,而是研究一切系统所具有的共同的、一般性特征及规律,这种抽象的系统就称其为"一般系统"。 [ 查看详细 ]
系统研讨会推荐
系统相关帖子
系统资料下载


系统专栏文章
热门主题
DSP 铁路道口图像监控系统
ARM/DSP双核系统
片上可编程系统(SoPC)
门禁系统
管理系统
信息娱乐系统
防盗系统
智能系统
车载信息娱乐系统
Meego.操作系统
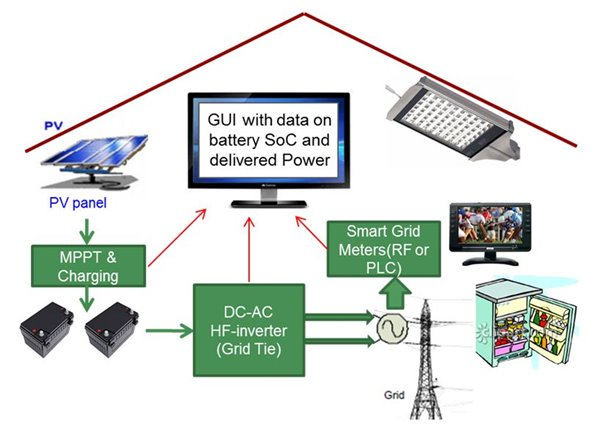
光伏系统
嵌入式系统Cortex&mdash
DSP/BIOS实时操作系统
应用系统
通讯系统
“北斗”系统
全球定位系统(GPS)
cdma2000-1x系统
语音系统
文件系统
嵌入式实时操作系统
数据采集系统
系统级芯片
系统级
智能交通系统
存储系统
汽车导航系统
电源系统
车载系统
4200-SCS系统
电池管理系统
卫星导航系统
车载信息系统
闻亭数字系统
电话系统
多媒体系统
太阳能发电系统
图形化系统
Android系统
转向系统
专家系统
考勤系统
必胜教学(收费)管理系统
安全&底盘系统
发射/接收系统
μC/OS-II实时操作系统
Turbo-PROLOG系统盘
微电子机械系统(MEMS)
计数/定时器和中断系统
以太网供电系统(PoE)
自动抄表系统(AMR)
汽车轮胎压力监测系统(TPMS)
防抱死制动系统(ABS)
制动防抱死控制系统(ABS)
地理信息系统(GIS)
全球卫星定位系统(GPS)
信息系统(GIS)
地理信息系统(GIS)
蓝牙+GPS接收系统
RS-485系统
树莓派
linux