基于摄像头的赛道信息处理和控制策略实现
作者:上海交通大学电子系 胡晨晖 上海交通大学机械设计与自动化研究所 贾秀江 上海交通大学 自动化系 方兴
时间:2009-06-22
来源:
收藏
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
信息处理
原始数据包含了黑线的位置信息,为了稳定可靠地提取这一信息,我们采取了以下步骤:
二值化
由于白线对应的电平值较高,而黑线电平值较低,因此图中第43到48点间的凹槽就是黑线所在位置。为了提取出黑线,直观的想法是检测电平值的跳变。但实际黑白线边沿的电平经常不是突然跳变的,而有一个过渡过程,为此我们先对原始数据进行了二值化处理。这不仅使得边沿更加明显,而且可以去除电平值的一些小波动。二值化的结果如图2所示。
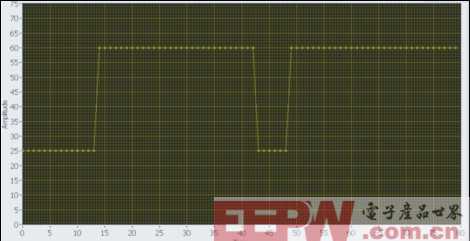
图2 单行数据二值化结果
黑线位置提取
二值化后,视频信号就只有黑白二种电平了。从左到右扫描视频信号,通常先扫到的是白点;否则若是黑点(赛道外),则继续往下,直到第一个白点。然后,设置一个计数器记录第一个白点后面连续出现的黑点数目。计数器初值为0,若检测到一个黑点,则加1;否则计数器重新置0。计数器每次清零前,判断是否大于2小于10(这可以滤除一两个黑点产生的毛刺):如果是,则黑线中心位置为当前点的坐标减去计数器值的一半;否则,继续扫描直到整行结束。最后单行的黑线提取位置如图3所示。













评论