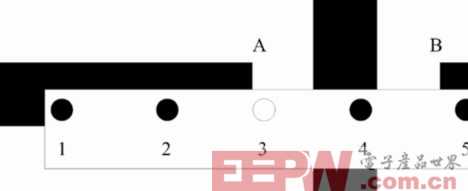
关于智能车模起跑线识别方法的设计与实现 —— 作者:太原理工大学信息工程学院 薄志强 时间:2009-06-22 来源:太原理工大学计算机与软件学院 姚世选 裴永斌 常晓明 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 图5 光电传感器阵列与起跑线的相对关系(2) 1) 光电传感器阵列有2个传感器检测到白色跑道而其它传感器检测到黑线时,如图4所示; 2) 光电传感器阵列有1个传感器检测到白色跑道而其它传感器检测到黑线时,如图5所示。 根据以上两种情形,在光电传感器阵列采用等距分布的情况下,可有如(1)式所示的数学描述。 (1) (2) (3) 根据(3)式,做如图6所示的数轴标注方法来表示不等式的取值范围。 上一页 1 2 3 4 5 6 7 8 下一页




















评论