关于智能车模起跑线识别方法的设计与实现
——

设计思想及算法实现
常用的车模巡线方案有光电传感器阵列和CCD探测法等[2],这里介绍光电传感器阵列的设计方案。光电传感器是靠红外发射管和红外接收管组成的传感器,如图3所示。
红外发射管发射的红外线具有一定的方向性,当红外线照射到白色表面上时会有较大的反射,如果距离Dl取值合适,红外接收管可接收到反射回的红外线,再利用红外接收管的电气特性,在电路中处理红外线的接收信息;如果反射表面为黑色,红外光会被表面将其大部分吸收,红外接收管就难以收到红外线。这样,就可以利用红外收发管组成的光电传感器检测赛道黑线,实现智能车的巡线方案。
(a) 白色反射面下的红外反射
(b) 黑色反射面下的红外吸收
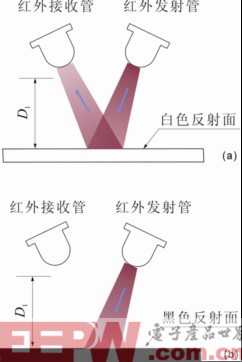
图3 用于路况识别的红外光电传感器



















评论