基于CPLD的高速超声车距报警器设计

摘要:本文给出了一个基于CPLD高速超声车距报警器系统设计。
本文引用地址:https://www.eepw.com.cn/article/4750.htm关键词:车距报警器;CPLD;双口RAM
引言
为减少汽车碰撞事故的发生,汽车碰撞技术在近年发展很快。汽车避撞技术首先需要解决的问题是汽车之间的安全距离,当汽车与汽车之间的距离小于安全距离时,就应该能够自动报警。本文给出了高速防撞器的核心部分:车距报警器的设计方法。笔者设计了一款安装于车前/车尾的便携式系统,能在汽车停车、倒车以及行使过程中自动监控汽车与其它汽车、人和障碍物之间的距离,如果距离小于规定的安全距离(一般为两米左右)则报警,防止恶性事故的发生。
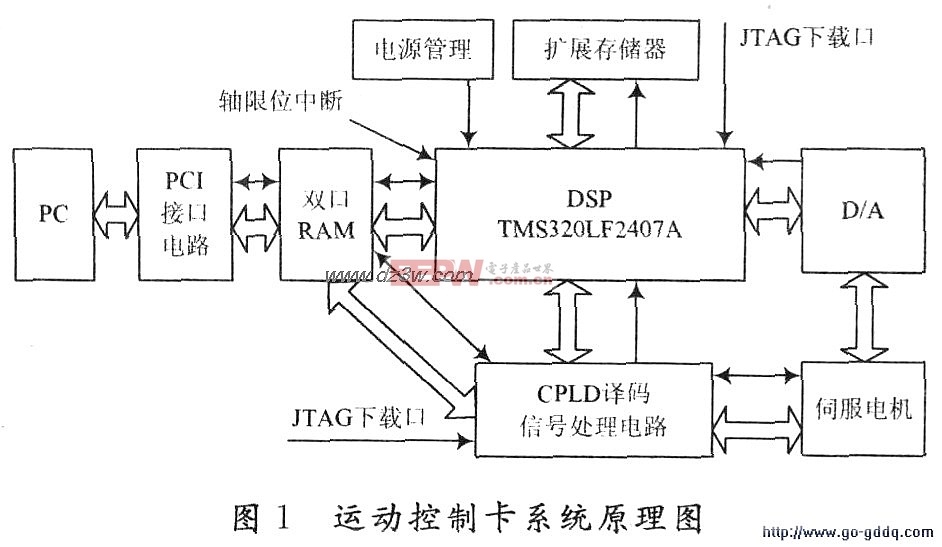
其原理是不断监控利用超声波距离传感器得到的距离信息,遇到“危险信号”(距离过小)则报警。但是,由于汽车在行使过程中一般速度较高,同时某些用途的汽车的驾驶环境决定了其交通环境具有突发性、意外性的特点。因此,距离报警器必须具有实时、准确的特点,这对该系统的实时性要求非常高。系统原理框图如图1所示。
图1 系统原理框图
系统功能
系统的功能框图主要有两个子系统组成:信号采集子系统和监控子系统,如图2所示。其中,信号采集子系统用于实现高速距离信号的采集,核心器件包括一片CPLD和一个和超声测距传感器相连的ADC。而监控子系统由51单片机最小系统组成,主要负责信号的预处理、判断和驱动报警器。两个子系统之间的通讯,由一片双口RAM来完成。
图2 系统组成框图
两个子系统的具体功能实现如下:
高速信号采集子系统









评论