多功能智能室内定位导航仪设计案例

3.4 系统软件流程(除图片外需有文字介绍)
本文引用地址:https://www.eepw.com.cn/article/274613.htm
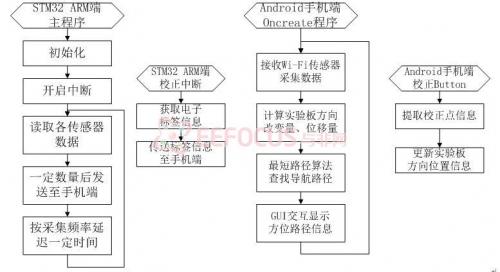
图3.4.1 程序运行流程图
1.ARM端主程序:初始化实验板各传感器控制字;设置中断向量,开启中断;建立socket套接字;一定频率读取加速度、角速度、温度、气压等传感器测量所得数据,10次测量值为一组打包Wi-Fi发送至Android手机端软件。
2.ARM端校正中断:RFID阅读器检测到电子标签触发中断,获取标签编号,建立信息帧发送至手机端软件。
3.手机端主程序:初始化程序,监听Socket端口;接收ARM发送的传感器测量值数据包;对数据进行滤波处理,累加计算实验板方向改变量,根据实验板当前方向及各方向上的加速度量计算实验板绝对直角坐标系下的位移量;根据地图拓扑信息最短路径算法搜索出导航线路;GUI人机交互界面显示地图路线、方位信息。
4.手机端校正按键:用户走到明显标志物处,触摸按键,交互提示用户确认当前位置,更新程序内计算得到的方向位置信息以消除时间积累误差。




评论