四轴飞行器无刷直流电机驱动控制设计的实现

2反电势过零检测
无刷直流电机能够正常连续运转,就要对转子位置进行检测,从而实现准确换向。电机转子位置检测方式主要有光电编码盘、霍尔传感器、无感测量三种方式。由于四轴飞行器无刷直流电机要求系统结构简单、重量轻,因而采用无位置传感器的方式,利用第三相产生的感生电动势过零点时刻延迟30°换向。虽然该方法在电机启动时比较麻烦,可控性差,但由于电路简单、成本低,因而适合于在正常飞行过程中不需要频繁启动的四轴飞行器电机。
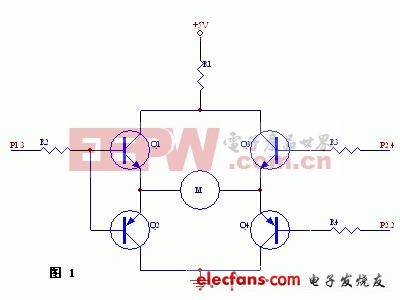
由于无刷直流电机的两相导通模式,因而可以利用不导通的第三相检测反电势的大小。如图2反电势检测电路,中性点N与单片机的AIN0相接,Ain,Bin,Cin分别接单片机的ADC0,ADC1,ADC2.不停地比较中性点N电压与A,B,C三相三个端点电压的大小,以检测出每相感生电动势的过零点。ATMEGA16单片机模拟比较器的正向输入端为AIN0,负向输入端根据ADMUX寄存器的配置而选择ADC0,ADC1,ADC2,从而利用了单片机自带的模拟比较器的复用功能。当A,B相通电期间,C相反电势与中性点N进行比较,类似的,就可以成功检测出各相的过零事件。
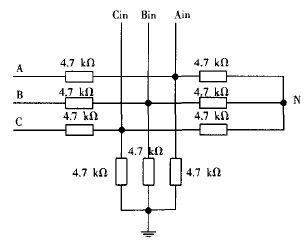
图2反电势检测电路
电机的反电势检测出来后,就可以找到反电势的过零点,在反电势过零后延迟30°电角度进行换向操作。
3控制程序设计
3.1驱动控制电路上电自检
无刷直流电机驱动控制部分包括MOSFET自检、电机启动控制和电压电流监测功能3部分。驱动控制电路的上电自检流程如图3所示,包括MOSFET短路特性与导通特性测试、以防止过流损坏电路。
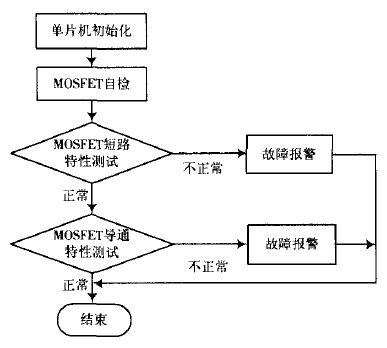
图3驱动控制电路上电自检流程图
3.2软件启动控制
反电势检测法只有在电机正常运转后才能进行,当电机不转或转速很低时,其反电势无法检测,因而采用软件启动的方式。针对无位置传感器无刷直流电机的控制,本文采用三步启动的方法,首先,给A,B相通电一段时间以固定电机转子位置;六状态轮流换向,通电时间逐步减少;检测第三相的反电势,若正常则启动成功,否则重新启动。具体的启动流程如图4所示。
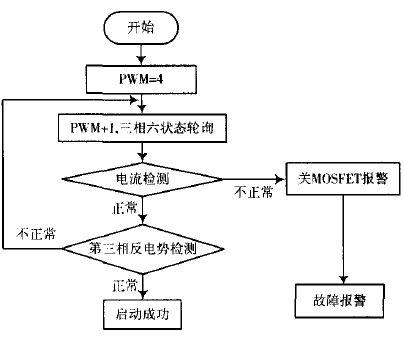
图4无刷无感直流电机启动流程

比较器相关文章:比较器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理




评论