深入了解PSoC®4A :基于SCB的串行通信设计

① I2C串行通信简介
I2C(Inter Integrated Circuit)是一种两线制的串行通信协议,被广泛应用于嵌入式设备中芯片之间的低速互连通路,如单片机,ADC,DAC,EEPROM,温度传感器, 电源检测器等,与UART只能实现点到点通信模式不同,I2C总线可以方便的构成多机系统和外围器件扩展系统,器件地址采用硬件设置方法,并通过软件进行寻址。图6给出了I2C总线拓扑示意图。
图6:I2C总线拓扑示意图
由图2可以看出,I2C总线共有两根信号线,SDA串行数据线与SCL串行时钟线。SCL保证了总线上所有器件的时钟同步,可实现较快的传输速率(标准模式为100Kbps,高速模式可达3.4Mbps)。I2C总线可以同时连接多个节点设备,并支持多主从设备模式,但同一时刻只能由一个主设备,负责产生SCL同步时钟和发起与结束一次数据传输。且主设备和从设备均可作为发送器(写数据)和接收器(读数据)。
由于只有一根SDA数据线,因此I2C总线只能实现半双工传输模式。数据的读/写均由主设备发起与结束。以读数据为例,首先主设备发起数据传输,输出START事件并输出7bit的从设备地址和读标志’1’;接下来主设备释放SDA,被寻址的从设备拉低SDA作为对主设备的应答(ACK)。然后从设备将通过SDA向主设备发送8位数据,主设备接收完成后发送应答(ACK)信号。当主设备读完所有的数据,输出STOP事件,结束本次传输。过程示意如图7所示。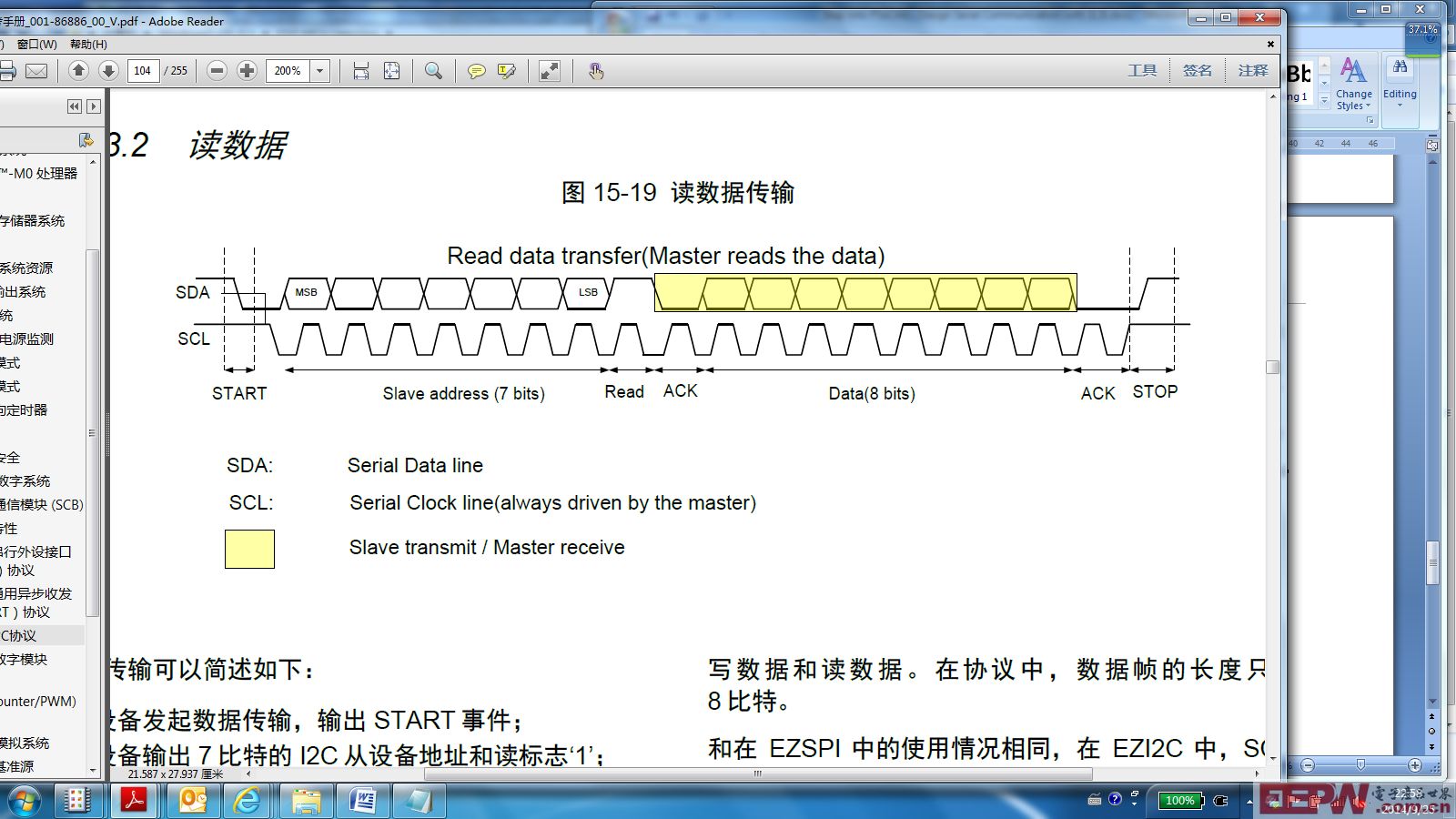
图7:I2C总线主设备读数据示意
当总线上多个主设备在同一时刻发起数据传输时,冲突检测和仲裁机制能够保证数据不被丢失。当主设备侦测到SDA 上的逻辑值与自身驱动的值不符时,则检测到总线冲突,并放弃对总线的控制。更多I2C 协议的知识请参考官方的I2C 协议标准。
② 基于SCB的I2C通信实现
在图2所示的配置框中,将SCB配置为I2C模式,点开出现的” I2C”菜单,配置基本的I2C通信参数,如图8所示;需要注意的是,当配置为Master模式的时候,不需要设置地址,只有在配置为Slave模式时,才需要7位地址。
I2C只能支持半双工通信,因此在同一时刻,数据发送和接收模式只能选择一种。与UART相似,数据的发送和接收都可以用中断与轮询两种方式来完成。
PSoC Creator 3.0 本身带有I2C半双工数据处理的Example Project;点击菜单File->Example Project,选择PSoC 4 Architecture,然后选择”SCB_I2cCommMaster”(主设备模式)或”SCB_I2cCommSlave”(从设备模式)即可打开I2C通信例程。本文以”SCB_I2cCommMaster”为例,打开后的原理图界面如图9所示。
图 8:I2C通信参数配置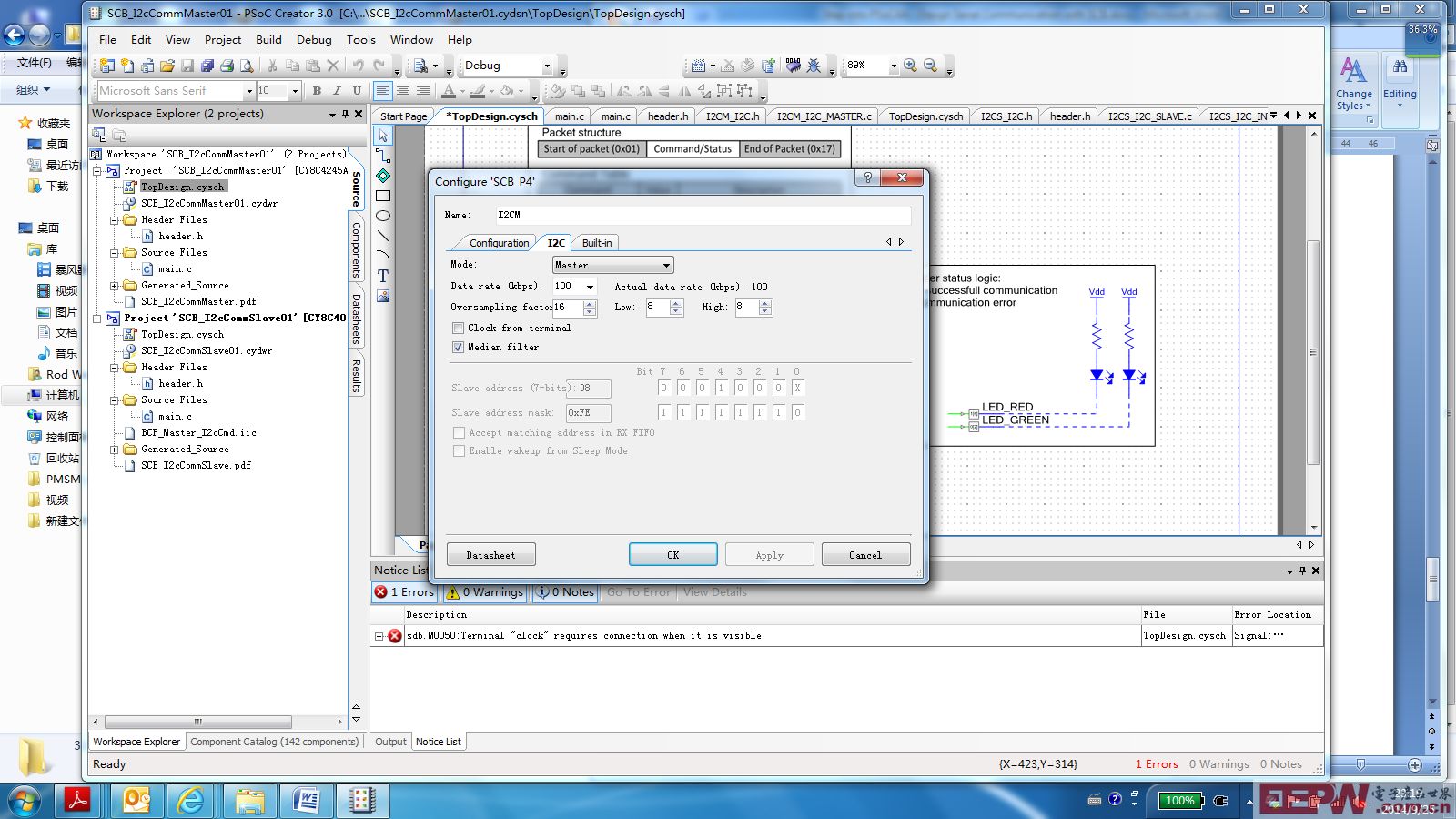
本例程中的主设备通过I2C总线发送0,1,2,3四个数字给下位机来控制RGB三色LED灯的循环点亮。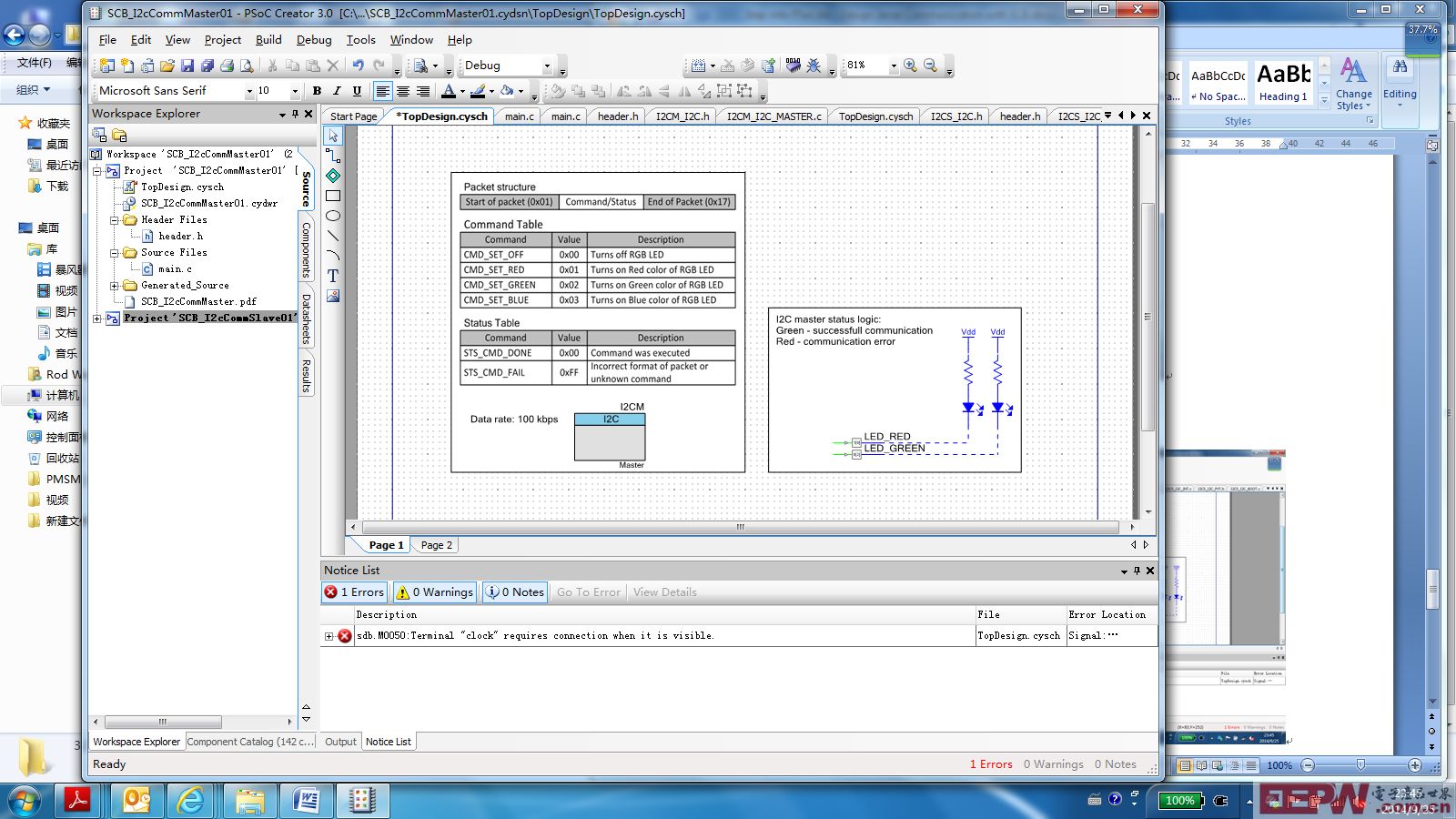
图 9: SCB_I2cCommMaster
发送数据的函数代码如下:
uint32 WriteCommandPacket(uint8 cmd)
{
uint8 buffer[BUFFER_SIZE];
uint32 status = TRANSFER_ERROR;
/* Initialize buffer with packet */
buffer[PACKET_SOP_POS] = PACKET_SOP;
buffer[PACKET_CMD_POS] = cmd;
buffer[PACKET_EOP_POS] = PACKET_EOP;
(void) I2CM_I2CMasterWriteBuf(I2C_SLAVE_ADDR, buffer, PACKET_SIZE, I2CM_I2C_MODE_COMPLETE_XFER);
while (0u == (I2CM_I2CMasterStatus() & I2CM_I2C_MSTAT_WR_CMPLT))
{
/* Waits until master completes write transfer */
}
/* Displays transfer status */
if (0u == (I2CM_I2C_MSTAT_ERR_XFER & I2CM_I2CMasterStatus()))
{
RGB_LED_ON_GREEN;
/* Check if all bytes was written */
if(I2CM_I2CMasterGetWriteBufSize() == BUFFER_SIZE)
{
status = TRANSFER_CMPLT;
}
}
else
{
RGB_LED_ON_RED;
}
(void) I2CM_I2CMasterClearStatus();
return (status);
}
函数发送三个字节长度的buffer数组给从设备,第一个字节为起始符字节”PACKET_SOP”,第二个字节为数据字节”cmd”, 第三个字节为结束符字节”PACKET_EOP”。数据的发送通过函数” I2CM_I2CMasterWriteBuf”来执行,它寻址从设备并自动将数据加载到总线上。接下来是不断轮询数据发送的状态,直到成功发送完成。接收数据的过程与此类似,您可参考本例程中的数据读取函数。
5. 基于SCB模块的SPI串行通信实现
① SPI串行通信简介
SPI(Serial Peripheral Interface:串行外设接口)总线是Motorola公司 推出的 一种同步串行接口技术。SPI总线允许MCU以全双工的同步串行方式,与各种外围设备进行高速数据通信。主要应用在EEPROM,Flash,RTC(实时时钟),ADC,DSP以及数字信号解码器之间。
SPI数据传输共有四根信号线:SCLK为串行时钟信号,由主设备产生,并传输到从设备作为同步时钟;MOSI/SIMO为主出从入数据信号,由主设备输出,输入到从设备。MISO/SOMI为主入从出信号,由从设备输出,输入到主设备。SELECTx为从设备选择信号,由主设备输出,输入到从设备,一般为低电平有效。
SPI总线拥有最高的传输速率,最低标准速率为500Kbps,最高可达8Mbps,且为全双工模式,因此特别适合于MCU用来读写诸如EEPROM等片外设备中的数据。
图10给出了一主三从的SPI总线串行通信系统框图。SPI总线一般为”一主多从”拓扑结构,进行数据传输时,主设备首先控制相应的一根SELECTx来选择从设备,然后主设备向从设备同时传输时钟(通过SCLK)和数据(通过MOSI/SIMO),从设备对该数据进行采样;如果主设备需要读数据时,从设备将数据发送到MISO/SOMI线上,主设备对该数据进行采样。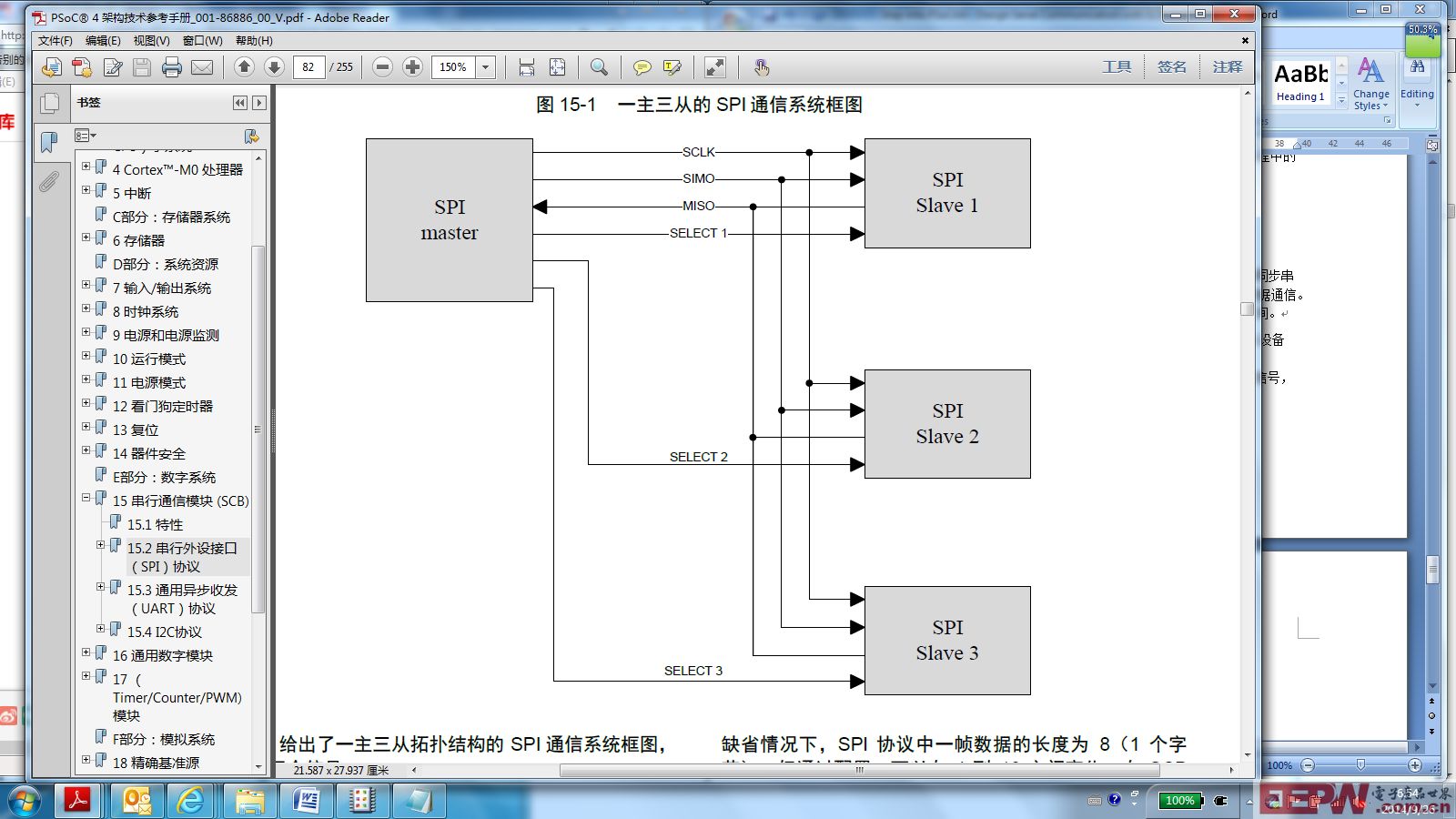
图10:SPI总线串行通信系统框图
在连续传输多帧数据时,SELECT 信号一直被拉低。从设备就无法利用SELECT 的状态来区分每一帧,从而需要一直监测数据,根据主从设备之间约定的协议找出帧头和帧尾。当总线结束数据传输时,SELECT 被重新拉高,SCLK 无时钟输出。摩托罗拉定义了SPI 协议中的四种信号传输模式,规定数据在哪个时钟沿被发送和采样。通过配置时钟极性(CPOL: Clock POLarity)和时钟相位(CPHA: Clock PHAse)来选择四种模式中的一种。图11给出了传输模式0(SCLK 空闲态为低,时钟上升沿采样数据,时钟下降沿发送数据) 下,双帧(16bit)数据传输的波形图。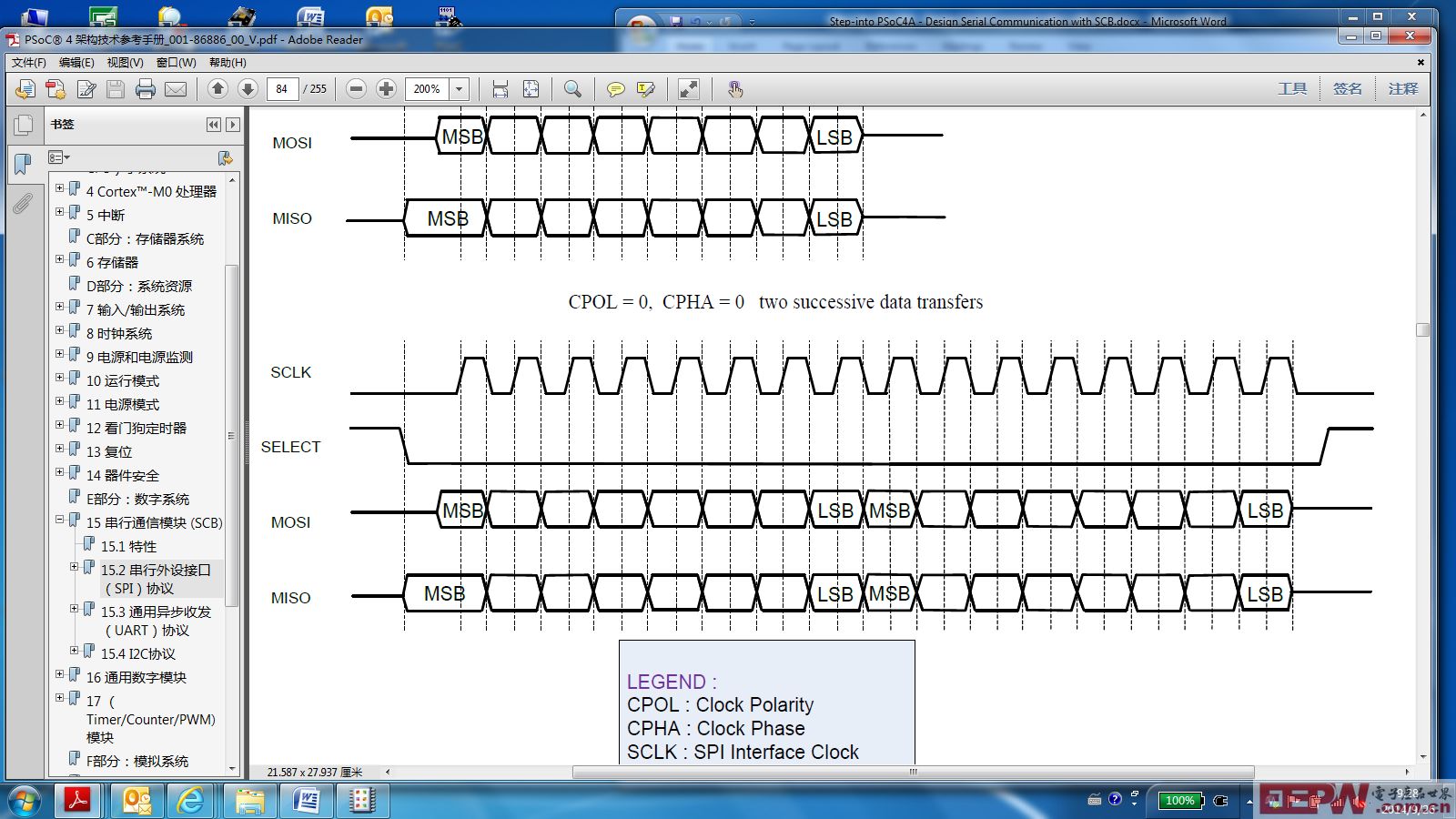
图11:传输模式0 下的双帧数据传输波形图
除了Motorola公司提出的初始版本SPI协议外,TI(德州仪器)与NSC(国家半导体)也在其基础上提出了各自的修改版SPI协议。关于SPI协议的详细信息,您可以参考相关的理论文献。
② 基于SCB的SPI通信实现
在图2所示的配置框中,将SCB配置SPI模式,点开出现的”SPI Basic”菜单,配置基本的UART通信参数,如图12所示;”SPI Advanced”菜单下的TX Buffer 和RX Buffer参数保持默认的16个即可。
图 12:I2C通信参数配置
SPI可以支持全双工通信,但是只能有一个器件为Master。SPI数据帧的长度限制较为宽松,可在4bit到16bit之间自由配置。UART相似,数据的发送和接收都可以用中断与轮询两种方式来完成。
PSoC Creator 3.0 本身带有SPI全双工数据处理的Example Project;点击菜单File->Example Project,选择PSoC 4 Architecture,然后选择”SCB_SpiComm”即可打开SPI通信例程。打开后的原理图界面如图13所示。
该例程以1Mbps的传输速率,8bit每帧的方式将一组固定的数据(如图13所示)由Master发送到Slave,并从Slave读取一组固定的数据(如图13所示)到Master。
图 13: SCB_SPIComm 参考例程
数据传输的函数代码如下:
/* Writing data into the SPIS TX software buffer */
SPIS_SpiUartWriteTxData(0x11u);
SPIS_SpiUartWriteTxData(0x22u);
SPIS_SpiUartWriteTxData(0x33u);
SPIS_SpiUartWriteTxData(0x44u);
SPIS_SpiUartWriteTxData(0x55u);
SPIS_SpiUartWriteTxData(0x66u);
SPIS_SpiUartWriteTxData(0x77u);
SPIS_SpiUartWriteTxData(0x88u);
SPIM_ClearMasterInterruptSource(SPIM_INTR_MASTER_SPI_DONE);
/* Writing data into the SPIM software buffer */
SPIM_SpiUartWriteTxData(0x99u);
SPIM_SpiUartWriteTxData(0xAAu);
SPIM_SpiUartWriteTxData(0xBBu);
SPIM_SpiUartWriteTxData(0xCCu);
SPIM_SpiUartWriteTxData(0xDDu);
SPIM_SpiUartWriteTxData(0xEEu);
SPIM_SpiUartWriteTxData(0xFFu);
SPIM_SpiUartWriteTxData(0x12u);
/*
* We need to know the moment when SPI communication is completed
* to display received data. SPIM_INTR_MASTER_SPI_DONE status should be polled.
*/
while(0u == (SPIM_GetMasterInterruptSource() & SPIM_INTR_MASTER_SPI_DONE))
{
/* Wait while Master completes transaction */
}
可以看出SPI串行通信的代码实现也很简单,分别将需要发送和接收的数据写入Master和Slave器件相应的寄存器即可。然后就等待SCB模块自动置位传输完成标志后即可以将所获得的数据用于程序处理了。关于数据帧的长度和传输故障的处理,用户可以根据自己的需要自行配置。
6. 小结
本文主要介绍了PSoC®4A片内SCB模块的主要功能与配置方法,以及如何使用SCB模块实现行UART,I2C和SPI这三种最常用的串行通信协议,并详细介绍了PSoC Creator 3.0 开发工具自带的UART,I2C和SPI通信例程,可以帮助用户加快开发过程,并使用PSoC®4A进行简洁高效的产品设计。
参考文献
[1]. PSoC® 4: PSoC 4200 Family Datasheet
[2]. PSoC® 4 Architecture TRM
[3]. PSoC 4100/4200 Family PSoC® 4 Registers TRM (Technical Reference Manual)
[4]. UM10204 I2C-bus specification and user manual

数字通信相关文章:数字通信原理
通信相关文章:通信原理







评论