智能追光锂电充电系统设计

其管脚排列如图19所示。
本文引用地址:https://www.eepw.com.cn/article/258302.htm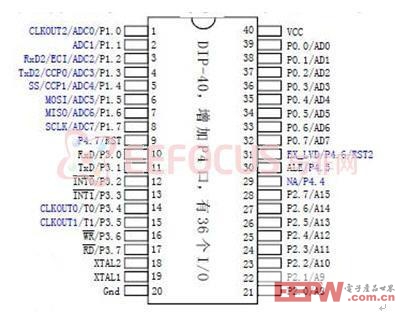
图19 STC12C5A60S2管脚排列
单片机的时钟电路和复位电路分别如图20和图21所示。
时钟电路:
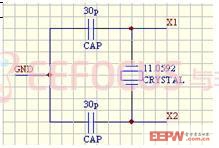
图20 时钟电路
复位电路:
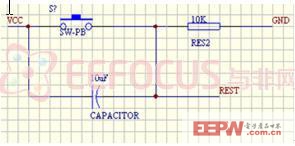
图21复位电路
此外,系统需要与上位机进行通信,采用MAX232做电平转换,以使单片机的TTL电平和RS232协议的电平相同。
具体电路如图22所示。
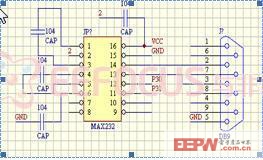
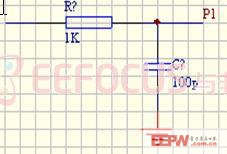
图22 MAX232转串口 图23 RC滤波
在使用A/D功能时,为消除信号干扰,在P1口设计RC滤波电路,如图23所示。
4、软件流程
(1)充电管理
在此段程序中,首先连续三次检测锂电的电压是否大于1V,判断放入的锂电池是否有效。待判断成功后,检测太阳电池的输出电压,若电压大于6V,采用降压充电通道,并打开此通道的充电门控,关闭降压充电通道;若电压小于6V,采用升压充电通道,并打开降压充电通道的充电门控,关闭升压充电通道门控。当检测到锂电池电压大于等于4.2V时或锂电池温度大于60°C时,关闭所有充电通道。程序一直对锂电池电压进行检测,直到锂电池电压降到4V且温度小于60°C时,根据相应情况打开相应的充电通道。
具体的程序流程图如图24所示。
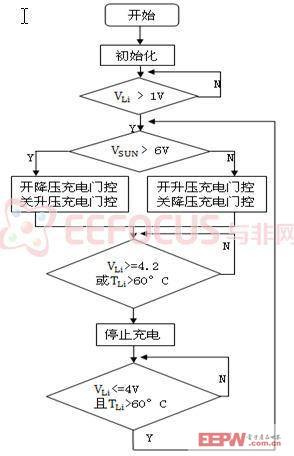
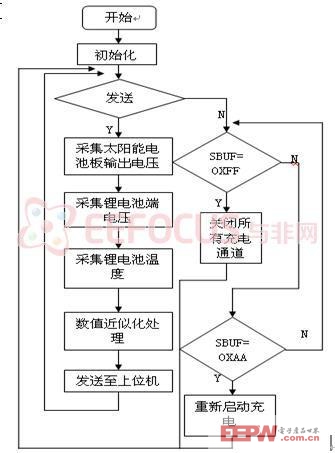
图24充电流程 图25串行通信流程
(2)串行通信
此段程序的主要任务是实现与上位机之间的通信。先进行判断是发送还是接收,若是发送,则将采集到的太阳能电池电压、锂电池电压、锂电池温度发送至上位机并在上位机界面上显示;若是接收,则需响应上位机发送的指令(0XAA为开始充电,0XFF为停止充电),并做出相应操作。
具体的程序流程图如图25所示。
(3)追光控制
此段程序用于实现太阳能电池板的实时追光。分别采集三个光敏电阻端和已知电阻端的电压,通过模拟量的电压分析,模糊地判断光线的强弱,并与另两路寻光传感器电路中得到的电压值相比较,判断出光源的位置,并将新的jd值赋给PCA捕捉/比较寄存器,产生新的PWM,调节舵机转动的角度,使太阳能电池始终对准光源。
具体的程序流程图如图26所示。
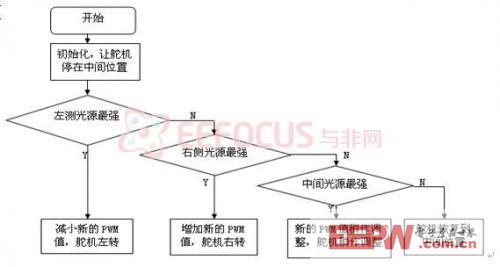
图26 追光流程
风力发电机相关文章:风力发电机原理





评论