在消费电子设备中集成MEMS运动处理方案

多运动处理功能带来了抗混叠挑战,适合游戏应用的100赫兹低通滤波器对导航应用而言可能会产生过大的噪声,而5赫兹低通滤波器对游戏来说因为截止频率太低而可能会引发延迟。对于这些需要不同滤波器带宽的应用,解决方法是使用满足最宽带宽要求的抗混叠滤波器,而使用可编程数字滤波器来适应对噪音有更严格要求的应用。
非集成运动处理方案(见图3)可能需使用专用的微控制器,它连续地以100赫兹频率采样, 以截止频率为5赫兹的数字低通滤波器进行滤波,并以10赫兹频率输出。该方案的缺点是微控制器带来的额外成本,不适于成本敏感的消费电子应用。
图3:使用多种运动传感器实现的非集成方案,需要分立的固定频率的低通滤波器。

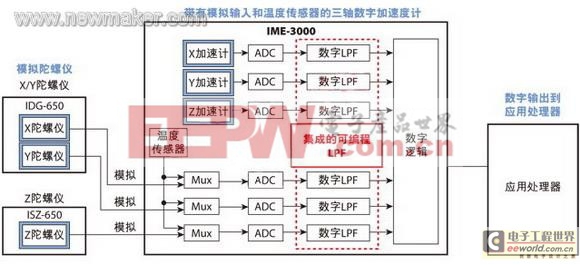
图4:带有可编程信号调理的集成运动处理方案,不再需要固定频率的外部低通滤波器
陀螺仪角度是由采样频率与角速度测量结果决定的,同步精度直接影响陀螺仪角度的测量精度。下面的公式给出了角度测量结果与采样速率和角速度之间的关系:

在当代手机中,加速度计与罗盘传感器相结合只提供最基本的运动传感功能(如倾斜传感和绝对位置),所以,并不进行实时的传感器数据整合,也不关注同步不准的问题。然而,随着越来越多的手机配备多个传感器(包括多轴运动处理系统所需要的陀螺仪),需要能在加速度计和陀螺仪之间提供预校准的同步计时功能从而省略微控制器的集成方案。例如,InvenSense六轴运动处理方案集成了三个直接与双轴和单轴陀螺仪模拟输出接口的高分辨率辅助ADC,以及针对多运动应用而提供抗混叠功能的内部可编程低通滤波器。
3:运动处理数据的同步
由于在手持消费电子系统中包含多运动传感器,需保证传感器数据采集同步进行,对于集成型运动处理方案来说,这是一个具有挑战性的难题。同时采集加速度计和陀螺仪的数据可达到更高的精度,但是,如果各个传感器有各自不同的计时要求,可能就需要进行插值运算,这将增加运动算法的复杂性。
多运动传感器所使用的提取数据方法可能不同,比如,你可能通过I(SUP/)2(/SUP)C接口以特定的采样频率从数字加速度计收集数据,但这个数据通过系统微控制器内部的较低分辨率的ADC对模拟陀螺仪的输出进行模数转换,这两个数据可能不匹配。紧密集成的六轴运动处理方案的优点是可确保所有的加速度计和陀螺仪的数据正确同步并以较低的设计复杂度来获得更高的精度。
4:频率要求
最后一个需要考虑的设计要点是,工程师必须确保陀螺仪的驱动器、传感器和谐波频率或任何其它成分的工作频率不互相干扰,以便尽量减少传感器融合输出的失真。工作在5千赫以下并对声音敏感的陀螺仪不能用在电视、视频游戏、收音机、人类语言、警报器、汽车或声响报警等音频信号源附近。消费电子系统中使用的扬声器通常工作在20赫兹到20千赫的范围,OIS执行器工作在500赫兹到4千赫范围,这些设备不会干扰InvenSense集成MEMS运动处理器的驱动频率(X轴24千赫,Y轴27千赫和Z轴30千赫)。这些驱动和传感频率的选择综合考虑了各种干扰因素,确保它们之间不会互相干扰,同时避开了音频频率范围和相机OIS执行系统的频率范围。
运动处理方案必须实现更高水平的集成,这里提出的设计要点可对全集成运动处理系统的选择提供依据并消除把它整合到消费电子产品中的障碍。













评论