一种新型的转子旋转速度大小及方向的测量装置

实际工业测量中,特别是航空、航天等一些特殊场合,既要检测转子的速度大小,又要测量转子的方向,因此研制一种结构小巧、安装简易方便并且稳定性、可靠性、测量精度都比较高的转子旋转速度大小及方向测量装置,将会在工业测量和科学实验中用途广泛,解决一些关键问题。
本研究提出了利用四象限光电探测器对转子速度大小和方向进行检测的光电测量方法,并研制了测量装置。该装置安装于转子的轴向位置,只用一个测速传感器即可实现转子转动速度大小及方向的在线检测。
1 转子速度大小及方向检测原理
图1为转子速度大小及方向的测量原理示意图。在转子顶端面的中心点一侧粘贴一高反射率薄膜,其对光的反射率明显高于转子端面的其余部分,经过光学系统后,在四象限光电探测器光敏面上的成像如图1所示。


2 测速传感器结构及测量系统组成
图4为测速传感器的光电成像系统结构示意图。高亮度的发光二极管发出的光经半透半反棱镜后,由透镜聚焦到转子的端面上。从端面上反射回来的光,再经过透镜和半透半反棱镜成像到四象限光电探测器的光敏面上。只有聚焦到高反射率薄膜上的光才能反射回到光电探测器。转子旋转时,成像到光电探测器上的光斑的位置会相应的变化。
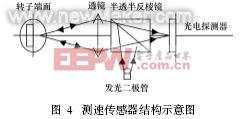

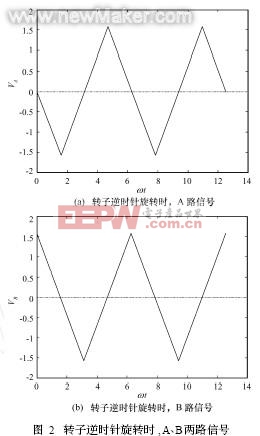
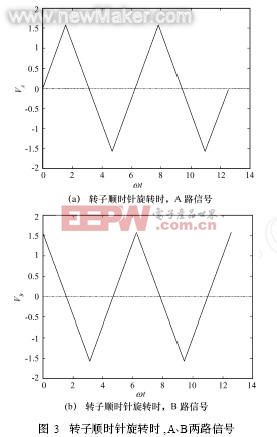
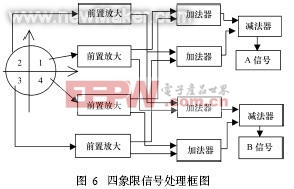
图6为四象限探测器的前置放大电路及和差处理电路框图。四象限光电探测器将接收到的光信号转换为电信号后,分别经过前置放大电路将电流信号转换为电压信号。运放器件选用高精度贴片式的快速运放,整个前置放大电路板很小,和四象限光电探测器一起封装在测速传感器内,以避免外部电磁干扰对测量信号的影响。上述输出的电压信号,经过和差处理后输出A、B两路信号, A路、B 路信号为类似于正弦的信号。由于采用了差动信号处理的方式,可以有效克服系统噪声的影响及外部干扰信号的影响。
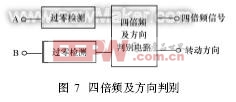
采用测量脉冲周期和测量脉冲个数相结合的方法,对转速进行计量。图8是以单片机为核心的信号处理结构框图。四倍频信号和转速辨向信号分别接到单片机的T0接口和P3. 0 口,采用89C51单片机,使用频率为12MHz的晶振。计算数据可以进行数字显示,也可以通过光电隔离的RS485接口,进行串行数据输出。为了单片机可靠工作,选用了X5045 芯片,该芯片集E2 PROM、电源监视和看门狗电路于一体,用于保存校准参数和系统参数以及对单片机运行情况进行监控。电路设计时,利用了SP I串行接口的特点,使测量仪器体积小、功耗低、工作稳定可靠。经实验测试,测量装置的转速测量范围为1~200 000 r/min,测量相对误差为±0. 001%。

图8单片机系统框图
该测量装置具有突出的特点:采用四象限硅光电探测器作为检测元件直接用来对转子的转速进行非接触测量,既能测量转子的转速大小,又能测量转子的旋转方向;测量装置小巧、简单;可以有效克服噪声的影响及外部干扰信号的影响;也可以克服光斑强度的变化对测量结果的影响;具有很高的测量稳定性和测试精度。实现了只用一个测速传感器即可对转子旋转速度大小及方向进行在线检测的测量方法。













评论