基于PLC的自动寻迹运输车控制系统设计

2系统硬件设计
2.1 转向及驱动控制电路设计
本设计运输车载重不超过70 kgCONTROL ENGINEERING China版权所有,对电机的负载能力有一定的要求,由于直流减速电机转动力矩大,可以产生较大转矩,因此选择xM4―10125A型直流减速电机作为该系统的驱动电机,该电机自带一个小链轮,齿数z1为9,选取大链轮齿数z2为19,所以传动比i为:

正常运行时,运输车运行速度V为:

式中:n为直流电机输出转速,4 r,s;d为运输车驱动轮直径,14cm。
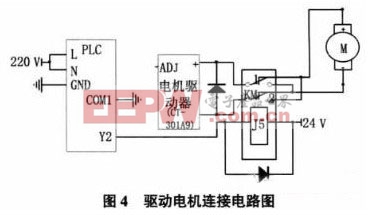
驱动电机连接电路图如图4所示。电机通电后经链条传动使驱动轮转动。本设计将PLC输出端Y2与两相继电器J5相连,当Y2低电平时,J5活动触点KM与触点l连接,电机正转;反之Y2高电平时,J5活动触点KM与触点2连接,电机反转。电机驱动器(CT一30lA9)通过J5连接电机,调整ADJ端子参数可以改变电机转速,检测到的路况输入信号,经过PLC控制单元进行计算并按结果的要求输出控制信号到Y2端,控制电机的正反转,从而实现运输车的前进、后退。












评论