运动控制型PLC的数控高速护角机

20PM具有2路500KHz的输入与输出,在电子凸*能中定义X轴为从轴,编码器输入轴为主轴,当定义好CAM Table后,从轴依据定义的曲线跟随主轴运动。采用高速双CPU结构形式,利用独立CPU处理运动控制算法,可以很好地实现各种运动轨迹控制、逻辑动作控制,直线/圆弧插补控制等,数控高速护角机正是利用了20PM运动控制器的电子凸*能很好的解决了上述高速切割时出现的不等长等问题。20PM的主要特点:
(1)20PM适用于高速、高精度、高复杂的运动控制场合;
(2)多段速执行及中断定位;
(3)64K 大容量, 内置Flash存储体;
(5)两组差分脉冲输出,最高脉冲输出达500KHz;
(6)两组手摇轮控制;
(7)内置电子凸*能,轻松实现绕线、飞剪、追剪等应用;
(8)支持PLC顺序逻辑控制及NC控制(G 码与M码)。

图3 台达运动控制器DVP-20PM00D
2.2 高速追剪解决方案分析
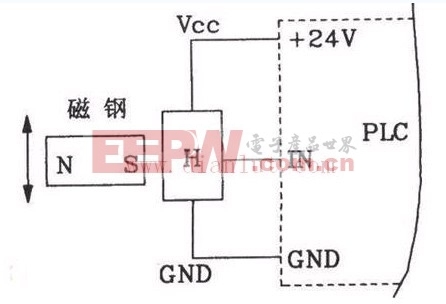
普通PLC一般利用高速计数,通过编码器输入到PLC内置高速输入点,高速输入編碼连接定长压轮,采集线速度,采集來的脈沖頻率乘以一定的速比,然后作為输出高速脉波驱动伺服,将动作速度与护角的线速度的速比进行简单速度同步,同时编码器的数值与预设长度的数值比较,达到预设值時,比如650PULSE,产生中断,就是使切刀动作。这种方法切刀動作總是在滯后動作,受線速度,PLC运算影响,同步精度差,计算量大,CPU处理时间较长,因此会出现定长不均匀等问题,严重影响成品的质量。在低速的情况下(10米左右速度)尚可基本达到要求,但是对于超过20米速度时就会长短不一,误差在2毫米以上。
20PM内置电子凸*能,采用独立运动处理芯片,通过硬件方式,能够实时处理主从轴之间的运动关系,2轴同步控制时间小于0.5ms,从而保证高速时主轴与从轴之间的位置和速度关系,解决高速时长短不一的问题,达到客户设备极限50米的生产速度,误差基本上在0.1MM之内 。基于20PM的高速追剪解决方案硬件配置如表1所示。
表1 硬件配置

基于20PM的高速追剪解决方案电子凸轮软件设定如图4所示。图示追剪控制的CAM(数控编程)图,与飞剪控制的CAM图有些变化,观察CAM的速度关系图,运动机构反复运转,在同步区和物料送料速度一致,完成剪切后迅速反向返回,然后再次在同步区和物料送料速度一致。编码器脉冲输入与PLC脉冲输出完全按照轨迹一一对应,无须经过PLC程序扫描。因此,克服了过去高速时定长误差大,电机经常过冲等问题。

伺服电机相关文章:伺服电机工作原理






评论