伺服电机在金属切削机床上的应用

2)当输入阶段性速度指令时,它的速度曲线与转矩曲线如图4所示。
这时的加速转矩Ta相当于To,可由下面公式求得(ts=ks),
Ta==(2πVm/60*104)*1/ts(Jm+JL)。
5.工作机械频繁启动,制动时所需转矩,当工作机械作频繁启动,制动时,必须检查电机是否过热,为此需计算在一个周期内电机转矩的均方根值,并且应使此均方根值小于电机的连续转矩。电机的均方根值:
Trms=√[(Ta+Tf)2t1+Tf2t2+(Ta-Tf)2t1+To2t3]/T周
式中: Ta加速转矩(N.M)
Tf摩擦转矩(N.M)
To在停止期间的转矩(N。M)
t1t2t3t周 所知的时间可参见图5所示。
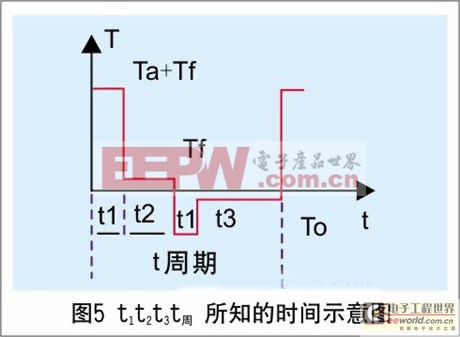
t1t2t3t周 所知的时间示意图
6.负载周期性变化的转矩计算(如图6所示),也需要计算出一个周期中的转矩均方根值Trms。且该值小于额定转矩。这样电机才不会过热,正常工作。
负载周期性变化的转矩计算图
二、负载惯量的限制
负载惯量与电机的响应和快速移动ACC/DEC时间息息相关。带大惯量负载时,当速度指令变化时,电机需较长的时间才能到达这一速度,当二轴同步插补进行圆弧高速切削时大惯量的负载产生的误差会比小惯量的大一些。
通常,当负载惯量小于电机惯量时上述提及的问题一般不会发生。如果高于5倍马达转子惯量,一般伺服会出现不良反应,像高速激光切割机床,在设计时就要考虑负载惯量低于电机转子惯量。台达伺服马达在此方面有它特有的优势,负载惯量比高,应用在此行业台达伺服的优势更为显著。

伺服电机相关文章:伺服电机工作原理
电子负载相关文章:电子负载原理


评论