岸边桥式集装箱起重机PLC程序的设计与实现

2.2. 程序编写
2.2.1. Symbol表的编写
在编写PLC程序之前,对于I/O 变量, 由于其在原理图上已定义, 我们可以先将其在SYMBOLS中输入。
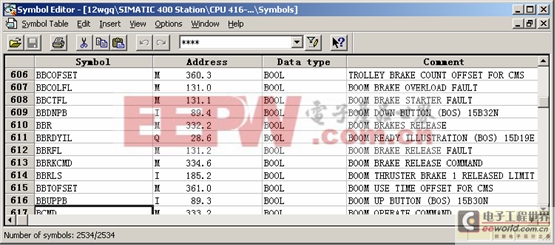
图2-1:SYMBOLS表
2.2.2. 岸桥起升运行程序
下面我们以起升机构为例, 编写一段岸桥起升运行程序。
步骤一:编写“起升允许”程序。我们编写的“起升允许”程序如下图2-2所示:
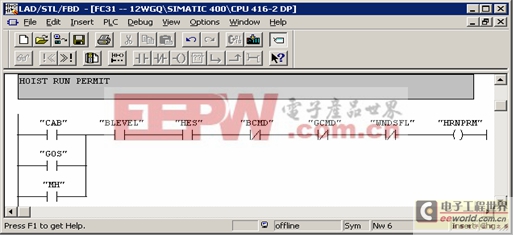
图2-2:编写 “起升允许”程序
步骤二:编写“起升命令控制”程序。当起升机构满足了“起升允许“,PLC就可以发出起升向上/下的命令。如图2-3所示:
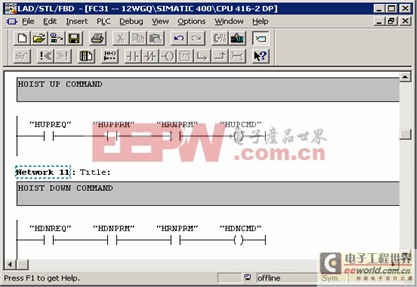
图2-3:起升运行命令
步骤三:编写“起升速度的控制”程序。在这段程序中:当司机在驾驶室把控制电源合上,并发出起升命令,如果有减速命令存在,则将给定值变为原来的10%,程序如下图2-4所示。
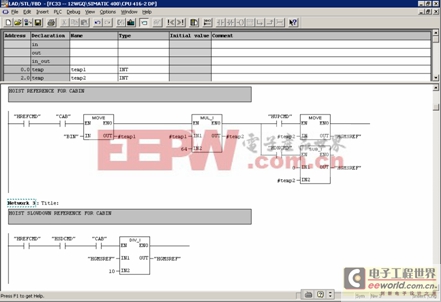
图2-4:速度给定信号处理
步骤四:编写“起升命令与速度控制”程序。以上的程序完成了岸桥起升运行的命令和速度给定的产生,最终我们就是要将这命令与速度给定通过PROFIBUS总线传输给变频器,如图2-6是调用了西门子公司功能块库中的一个PROFIBUS数据传送功能块PCD_SEND,用来传送数据块DB123中的16个字。。
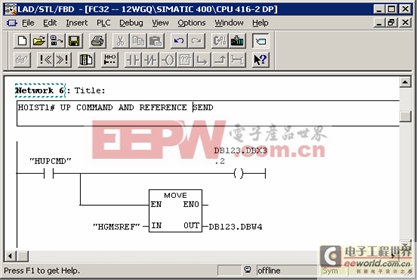
图2-5升命令与速度控制
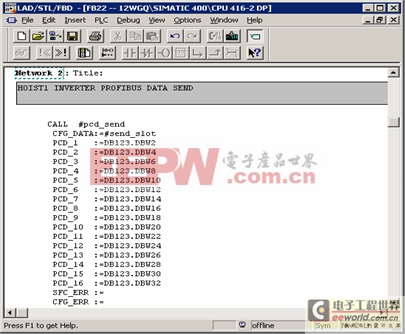
图2-6总线数据传输
2.2.3. 岸桥主要机构程序对应的功能FC(Function)
以上分析了岸桥起升机构的程序编写,与起升机构的程序类似, 岸桥的大车, 小车, 俯仰机构程序也要处理运行允许, 命令与速度给定,数据传输等。为了使整个项目程序结构清晰,我们将各个功能细分,如下图3-14所示是:主要机构运行控制的功能FC,以及用于命令与速度给定传输的PROFIBUS总线数据传输功能块FB:

评论