基于Modbus协议的触摸屏-PLC-变频器通信控制系统

3.2 变频器、plc、触摸屏串口通信参数设置
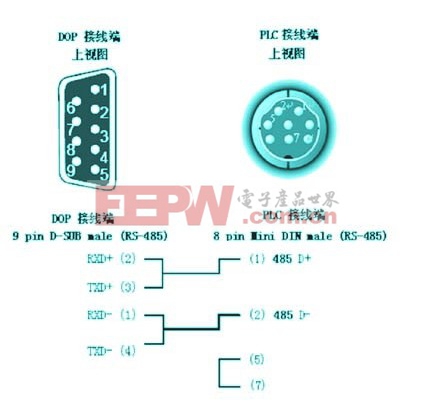
plc分别通过两个接口与变频器和触摸屏连接,整个系统采用modbus rtu的传输模式。ev2000变频器通信参数设置要点:
(1) 各通信参数要与twido plc com2口一致;
(2) 变频器要有自己唯一的地址;
(3) 变频器的通信跳线开关cn14设置在rs-485方向;
(4)变频器延时应答设为(ff.03)30-50ms。
dop-a触摸屏通信参数的设置要与twido plc com1口一致。具体的参数需要通过编程软件screen editor设置,下载至触摸屏后生效。dop-a和twido plc均支持modbus协议,所以可以通过modbus连接。在plc的通信程序中应编写一条赋值语句(例如:%mw2999:=0)为dop-a触摸屏的系统控制区和系统状态区开辟内存空间,否则将无法通信。twido plc中的内部位%m0对应dop-a中的b1,内部字%mw0对应w40001。
twido plc com1口和com2口之间可以配置相同的波特率、数据位、校验方式等参数,但是各自应配置不同且唯一的地址。
3.3 监控界面开发
整个系统的监控画面分为监测界面、操作界面和故障代码查询界面。监测界面如图3所示,完成对变频器运行状态和运行参数的监测。

图3 监测界面
操作界面如图4所示,主要完成变频器启动,停止,加减速运行、故障复位和运行频率的设定,同时连接故障代码查询界面,以备操作人员查询使用。
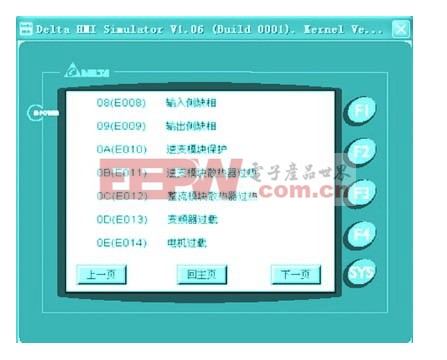
图4 操作界面
故障代码查询界面如图5所示,主要提供变频器常见故障代码索引。

图5 故障代码查询界面
4 plc通信程序开发
4.1 modbus功能码的选取
twido plc和ev2000都支持modbus协议,但是在具体细节上存在差异。因此取双方都支持的功能码进行程序的编写。ev2000支持的modbus功能码
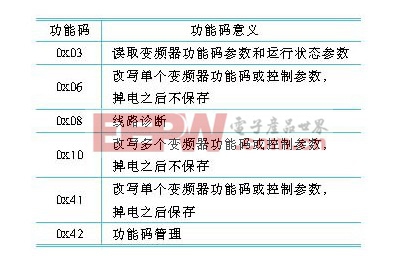
twido plc支持的modbus功能码
4.2 comm通信宏与grafect步进编程方法
twido plc的comm通信宏指令是用一条宏指令代表一组列表语言指令来实现复杂的功能。plc通过通信方式控制变频器,需要编写大量的功能性程序块。采用一般的modbus通信字表的形式编写,程序冗长不易阅读。使用comm通信宏指令,编程时不需要编写通信交换用的字表,使用一条宏指令即可(例如:c_wrnw 0 2)。功能码0x10(改写多个内部字)的modbus通信字表[3]:






评论