惯性变化时无刷直流电机的鲁棒控制器设计

(2)干扰抑制性能:输出速度(ωr)对负载干扰(tl)应该不敏感,即若参考输入速度(ωr*)为0,当系统加上负载转矩后,应有:
要满足上式,则需选择q使得的直流增益为0,即。由方程(13)可知,要满足该条件,即有:
3.3 独立参数的选择
q的选择必须满足上述的约束条件以减小转矩脉动,q一般具有以下形式:
 (15)
(15)式中a,b,pj均为自由设计参数,对系统的约束越多,则q的维数就越大,控制器就越复杂;反之,对系统的约束越少,则q的维数就越小,控制器就越简单。
4 仿真结果及分析
电机参数为:
1/j=5(kg·m2)-1,b/j=0.002(sec)-1,kt=0.4v/(rad/s)
根据前面所述的控制器的设计过程,可以得到控制器k(s)为:

图2记录的是电机参数没有变化时的转速波形,从图中可以看出,本文提出的控制器控制效果很好,转速无波动,且调节时间很短,小于5ms。图3记录的是电机参数没有变化时的负载干扰响应,从图中可以看出,在很短的时间内,负载转矩的影响就趋近于0。
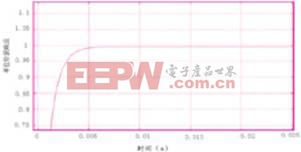
图2 标称参数下的转速响应
为了验证在惯性参数大范围变化情况下控制器的鲁棒性,假设电机参数变为:
情况1 1/j=1(kg·m2)-1,b/j= 0.001(sec)-1
情况2 1/j=25(kg·m2)-1,b/j= 0.008(sec)-1
图4、图5分别为在标称参数、参数变化(情况1)、参数变化(情况2)下的速度响应和负载干扰响应对比图,由图可以看出,即使电机惯性参数发生了很大的变化,系统依然稳定,各种动态性能仍然很好。
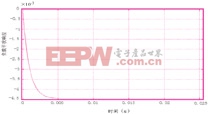
图3 标称参数下的负载干扰响应
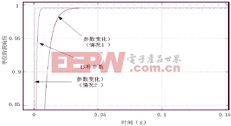
图4 系统参数变化时的转速响应
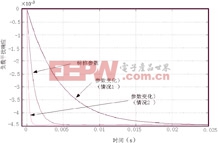
图5 系统参数变化时的负载干扰响应
4 结束语
本文利用q-参数化理论设计了一个无刷直流电机鲁棒控制器,用来减小由于各种原因导致的无刷直流电机的转速波动。该控制器的主要特点是在电机由于运行时间和运行环境变化导致电机参数发生变化时,也能保证系统的鲁棒稳定性和良好的动态响应,而且控制器阶数很低。数字仿真结果验证了该控制器的有效性。
作者简介
姜伟东(1975-) 男 硕士,主要从事电力机车的检修工作。
王劲松(1973-) 男 学士,主要从事工业自动化设计咨询工作。
参考文献
[1] 纪志成, 薛花, 董富红. 无刷直流电机调速系统间接模型参考自适应控制[j].电机与控制学报, 2004,8⑶:225-228.
[2] 吴志瑜, 赵晓蓓, 刘爱军等.无刷直流电动机位置伺服系统的变结构控制[j].微特电机,2006,34⑴:28-31.
[3] 赵学庆, 张国山, 陈学敏. 无刷直流电动机调速系统的模糊变结构控制[j].微特电机, 2006,34(7):20-22.
[4] m.azzam, yehia s.mohamed. robust controller design for automatic generation control based on q-parameterization[j]. energy conversion and management,2002, 43:1663-1673.
[5] abdelfatah m.mohamed, ilene busch-vishniac. imbalance compensation and automatic balancing in magnetic bearing systems using the q-parameterization theory[j]. ieee trans.on control system technology, 1995, 3⑵:202-211.
[6] abdelfatah m.mohamed,fumio matsumura, toru namerikawa et al. q-parameterization control of vibrations in a variable speed magnetic bearing[c]. proceedings of the 1997 ieee international conference on control applications. hartford, ct.october 5-7, 1997.
[7] selahattin ozcelik, howard kaufman. frequency domain design conditions for robust direct model reference adaptive controllers[c].proceedings of the american conference, albuquerque,new mexico june 1997.
[8] matt bement, suhada jayasuriya. synthesis of reduced order multivariable feedback tracking controllers using the q-parameterization[c]. proceedings of the 39th ieee conference on decision and control. sydney, australia,december, 2000.
[9] pragasen pillay, ramu krishnan. modeling, simulation, and analysis of permanent-magnet motor drives, part ii: the brushless dc motor drive[j].ieee trans.on industry applications,1989,25(2) 274-279.
[10]doyle j, francis b, and tannenbaum a. feedback control theory[m]. new york:macmillan publishing company.1992.本文引用地址:https://www.eepw.com.cn/article/236979.htm

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理




评论