基于前馈混合控制的BOOST型PFC控制器

根据控制理论知识,前馈控制可以消除扰动对系统的影响,从而提高系统的动态特性.负载电流的前馈控制如图3中虚线部分所示,其中GI(s)为前馈补偿器的传递函数.根据图3,可以得到直流输出电压

若选取前馈控制器的传递函数为
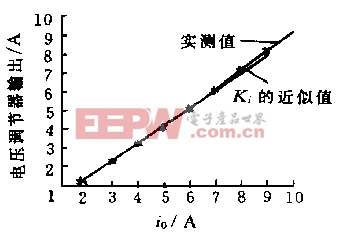
此时,可完全消除负载电流io的变化对系统直流输出电压Vc的影响.但前馈控制器GI(s)是否能够完全补偿io的扰动,取决于Gi(s)的结构和参数.由前面的分析可知,Gi(s)是一个小时间常数的一阶惯性环节,当系统运行在稳态时,Gi(s)相当于一个放大倍数为Ki的比例环节,此时可以精确地测定放大倍数Ki.实际上,由于系统中存在着非线性特性,在整个负载变化范围内,Ki并不是固定的.实验中测得的Ki与负载电流io的关系如图4所示.从图中可以看到:负载电流在1~7A区间时,整流器的放大倍数Ki基本上为一常数;在7~10A区间内,Ki略有增大. 可见,由于系统的非线性特性,在整个负载范围内,整流器的放大倍数是变化的.再加上整流器时间常数Ti也是随电压调节器输出i的幅值变化而变化的,因此,从理论上讲,设计一个能够完全补偿io扰动的前馈补偿器是不可能的.我们可以通过适当地设计前馈补偿控制器GI(s),对io扰动作近似补偿或者作稳态补偿,其余的部分再由反馈控制器作稍许调节,从而提高系统的动态性能.
在控制系统中,忽略输出电容C的充放电电流时,i2只与负载吸收的功率相对应.加入前馈控制器GI(s)后,在稳态的理想情况下,GI(s)的输出就与i2完全相等,也就是说,电压调节器Gv(s)的输出为0.

评论