单片机控制的步进电机自动定位系统

在升频段,设置定时器的初值由小到大,逐次按预定的频阶上升(图4);在降频段,设置定时器的初值由大到小,逐次按预定(图5)的频阶下降,控制按查询表格的方式进行。恒频段步长L由到达指定位置总步数减去升降段总步数确定。定时器T0的各频阶初值依次写在EPROM存储器的同一页中,上半页为升频时T0的初值,下半页为降频时的初值。系统的主程序见图4,单片机串口子程序见图5。
单片机通过串口接收到微机的指令后,执行相应子程序(图5)。微机通过两种方式发送指令:一种是非周期性指令,通常为操作者实时控制指令;另一种是周期性指令,要求单片机实时返回工作台当前位置及运行状态。单片机串口中断子程序接收指令后直接回送给微机,微机可以实时显示工作台当前位置。
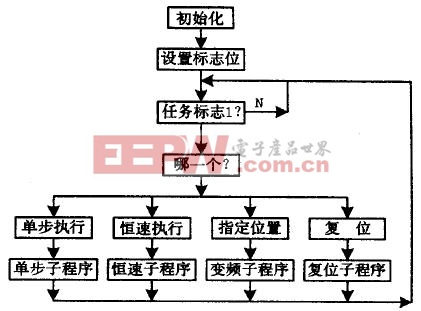
图4 单片机主程序框图
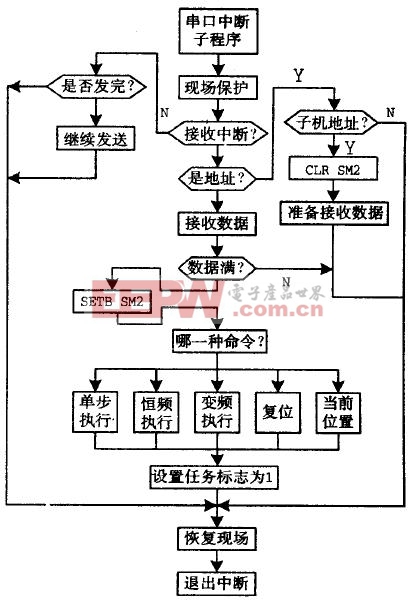
图5 单片机串口子程序图
4 实验结果及结论
经联机调试,系统运行正常,实现正转、反转、加减速、暂停等自动定位功能,达到设计要求。其特点如下:
⑴用89C51单片机微机系统,以软硬件结合,可降低成本,节约能源。
⑵采用变频控制,提高系统运行速度,可以节约大量时间,并具有良好的经济效益。
⑶采用RS232通讯口,实现了数控系统的通用性设计和远距离监控。
⑷软件采用模块化设计方法,易于维护。









评论