基于51单片机的汽车防碰撞系统的设计

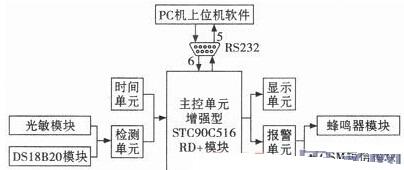
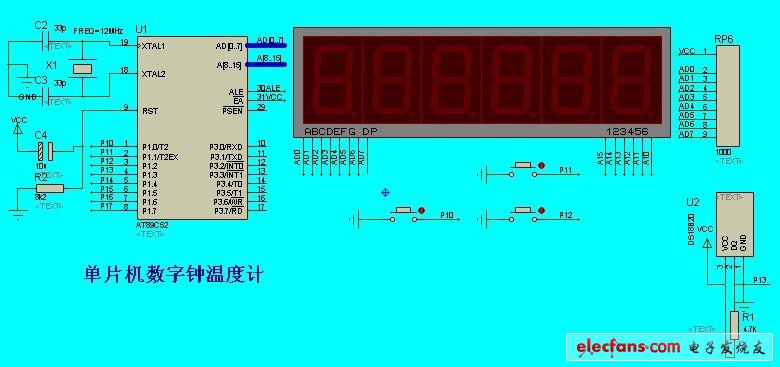
单片机转化为10进制后使显示电路动态显示障碍物距离S,同时判断如S小于设定门限值K,则使报警单元的红色LED灯持续闪烁,蜂鸣器连续长鸣报警,提醒驾驶员及时采取防碰撞措施。一定时间后驾驶员仍未采取有效措施时,单片机使执行单元紧急制动刹车,主动避免发生碰撞。
汽车倒车时,车速较低,超声波模块代替激光测距模块工作。在单片机IO口大于10US的高电平信号控制下,自动向后发射8个40KHZ的方波。
超声波返回后单片机由INT0引脚高电平持续时间测得超声波往返时间,通过换算得到汽车与障碍物之间的距离。之后利用系统的各个单元实现与激光测距相同的防碰撞工作。
5.系统软件设计
图4为超声波测距软件设计,系统启动后,超声波模块向后发射超声波,接收超声波的同时开启定时器定时,由测量到的时间T计算得到障碍物距离S,显示单元动态显示连续变化的距离S.如果距离S小于设定的门限值,则系统进行声光报警,LED灯不断闪亮,蜂鸣器持续鸣响,提醒驾驶员及时采取措施避免碰撞。延时1秒后如果距离S仍小于设定的门限值,表明驾驶员未进行任何有效操作,故系统控制汽车紧急制动,主动避免防碰撞的发生。
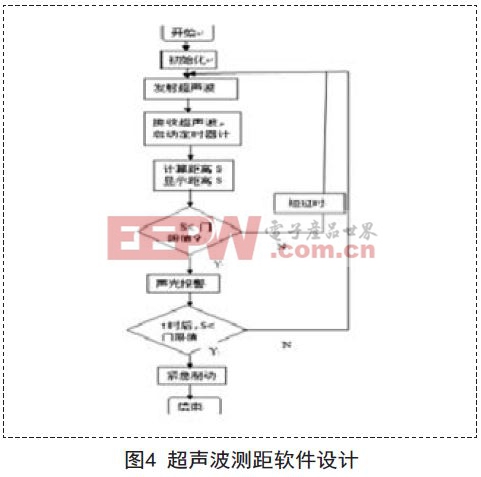
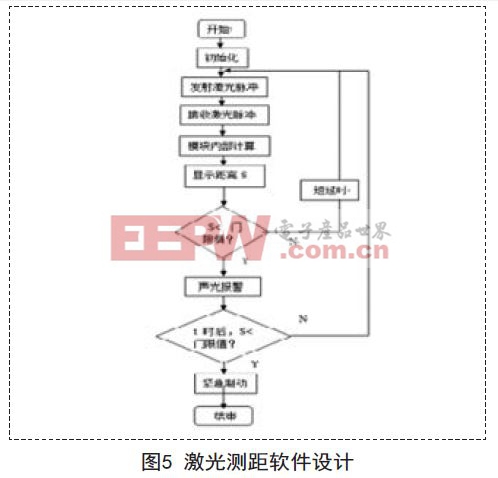
图5为激光测距软件设计,激光模块发射接收激光脉冲后,由模块内部电路同时完成计算距离S工作。如果S小于门限值则进行报警。
6.结论
系统选用了激光测距传感器和超声波测距传感器相结合的组合式测距方式。
单一传感器的测距方式受传感器的应用条件限制较大,难以满足汽车复杂的行驶状态和多变的外部环境,故本系统的优点显而易见。在汽车前进,倒车,低速,高速等多种行驶状态,本系统均能对汽车周围环境的障碍物进行有效的监测和测距,使汽车主动进行防碰撞,防止交通事故的发生,具有广阔的研究前景

51单片机相关文章:51单片机教程
单片机相关文章:单片机教程
单片机相关文章:单片机视频教程
单片机相关文章:单片机工作原理
蜂鸣器相关文章:蜂鸣器原理







评论