基于Atmel Mega8的无刷电机控制系统

b.换向调速电路
无刷直流电动机转速的控制方法可分为励磁控制法与电枢电压控制法两类?4?。由于前者所受的各类限制较多,且励磁线圈电感较大?动态响应较差。所以常用的是改变电枢端电压以实现调速的电枢电压控制法。设直流电源电压为Ud,为电枢串联一个电阻R并接到电源Ud,则电枢两端的电压Ua为Ua=Ud-IaR,显然?调节电阻R即可改变端电压?从而达到调速目的。但这种传统的调压调速方法效率较低。随着电力电子技术的发展?出现了许多新的电枢电压控制方法。PWM?脉宽调制?就是其中之一,其基本原理如图2所示。

设加在电机电枢两端的矩形波的幅值电压为Ud ?则电机电枢两端电压的平均值为
Ua=(T1-T2)Ud/(T1+T2)=(2T1/T2-1)Ud=(2α-1)Ud
其中α为占空比,通过改变α的值可达到调压的目的。由于0 ≤α≤1, Ua值的范围是-Ud~+Ud,因而电机可以在正、反两个方向调速运转。
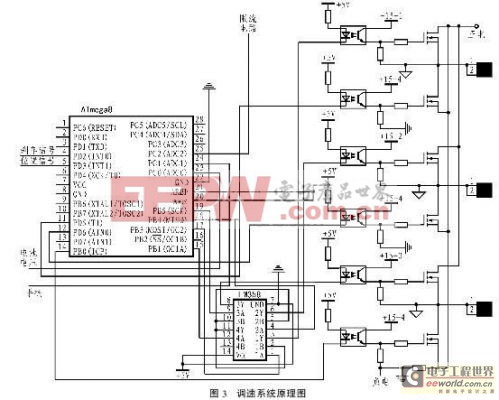
图3所示是一种电动自行车无刷直流电机调速系统的部分原理图。通过图中单片机可采样电动自行车手柄上可调电阻的电压,再经A/D转换后送到PWM寄存器,从而控制单片机的PB1脚,输出占空比可调的PWM 信号。该信号和来自限流电路LM358比较器的输出信号一起通过软件比较,在限流电路不工作的情况下输出PWM信号,以配合软件控制的PB0、PD5和PD6引脚来驱动相应的光耦,进而控制MOSFET全桥电路换相导通,实现电机的换向。因此,通过调节单片机PWM信号的占空比,最终可改变加在电动机定子绕组上的电压,从而实现电动机的调速。
4 系统软件控制
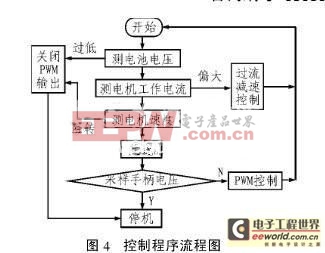
ATmega8在软件上能有效支持C语言及汇编语言。C语言目前已成为设计嵌入式系统的标准语言,它既有普通高级语言结构化编程、可读性好、维护方便的特点,又具有汇编等低级语言对硬件访问方便、代码效率高的特点。本设计是用C语言编程实现的,具有很好的可移植性,其程序流程图如图4所示。
5 结束语
用本方案设计的电动自行车a href="/mcu/search.php?keywords=调速控制search=1" target="_blank">调速控制/a>系统在实验运行过程中获得了良好的动、静态特性。高性价比ATmega8单片机的运用大大降低了成本,提高了软件设计灵活性,丰富了硬件接口功能,为今后系统升级创造了良好条件。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 脉宽调制相关文章:脉宽调制原理 双控开关相关文章:双控开关原理








评论