基于Atmega128嵌入式控制器的设计

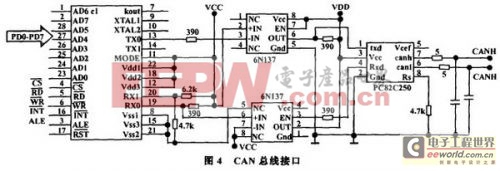
CAN总线接口如图4。SJA1000的AD0~AD7连接到Atmega128的PC口,CS连接到Atmega128的PG3。PG3为0时CPU片外存储器地址选中SJA1000,CPU通过地址可对SJA1000执行读/写操作。SJA1000的RD、WE、ALE与Atmega128的引脚相连,INT接Atmega128的PE7,Atmega128可通过中断方式访问SJA1000。
(5)与PC机的串行通信
考虑到智能控制节点要接收从RS232串口来的数据,因而采用了Atmega128的串行口进行中断接收,所用的引脚是PE0、PE1。通过MAX232进行数据传输。
(6)脉冲输入脉冲输出
由于输入信号的多样性,增加了PI/PO部分。
3MicroC/OS—II的移植
MicroC/OS—II移植到Atmega128上,需要修改OS_CPU.H,OS_CPU_A.S和OS_CPU_C.C三个与其相关的文件。其中OS—CPU.H主要完成的是数据类型、堆栈单位、堆栈增长方向的定义。相关的数据类型定义:
typedefunsignedcharBOOLEAN;
typedefunsignedcharINT8U;//无符号8位数
typedefsignedcharINT8S;//带符号8位数
typedefunsignedintINTI6U;//无符号l6位数
typedefsignedintINTl6S;//带符号l6位数
typedefunsignedlongINT32U;//无符号32位数
typedefsignedlongINT32S;//带符号32位数
typedeffloatFP32;//单精度浮点数
堆栈单位的定义:
typedefunsignedcharOS_STK;//堆栈入口宽度为8位
状态寄存器的定义:
typedefunsignedcharOS_CPU_SR;//定义状态寄存器为8位
堆栈增长方向的定义:
#defineOS_STK_GROWTH1;//AVR堆栈由高地址向低地址增长
0S_CPU_C.C文件主要包括任务堆栈初始化和实现操作系统规定的几个Hook函数。其中移植需要的Hook函数如下:
OSTaskCreateHook();OSTaskDelHook()
OSTaskldleHook();OSTaskStateHook()
OSTaskSwHook();oSTCBInitHook()
OSTimeTickHook()








评论