自动控制系统的设计--基于根轨迹的串联校正设计

校正后系统的开环传递函数为
![]()
相应的静态速度误差系数为:![]() 。
。
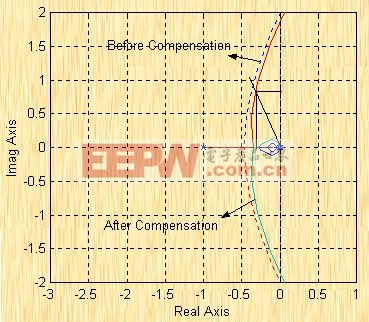
比较未校正系统和校正后系统的根轨迹可见,校正后系统的![]() 从0.8减到0.7,这意味着调整时间略有增加。如果对此不满意,则可重新选择希望闭环主导极点的位置,且使其
从0.8减到0.7,这意味着调整时间略有增加。如果对此不满意,则可重新选择希望闭环主导极点的位置,且使其 ![]() 值略高于0.8。
值略高于0.8。
 |
| 图6-23 |
6.4.3 迟后—超前校正
由上两节的讨论可知,超前校正主要用于提高系统的稳定裕度,改善系统的动态性能,而迟后校正则可以减少系统的稳态误差。由此设想,若把这两种校正结合起来应用,必然会同时改善系统的动态和静态性能,这就是迟后—超前校正的基本思路。
当希望的闭环主导极点Sd位于未校正系统根轨迹的左方时,如只用单个超前网络对系统进行校正,虽然也能使校正后系统的根轨迹通过Sd点,但无法使系统在该点具有较大的开环增益,以满足静态性能的需要。对于这种情况,一般宜采用迟后—超前校正。
设迟后—超前校正装置的传递函数为
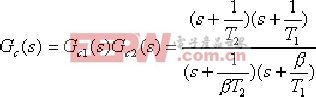 |
其中Gc1(s)起迟后校正作用,它使系统在Sd处的开环增益有较大幅度的增大,以满足静态性能的需要;Gc2(s)起超前校正作用,利用它所产生的相位超前角φc2使根轨迹向左倾斜,并通过希望的闭环主导极点Sd,从而改善系统的动态性能。
用根轨迹法进行迟后—超前校正的一般步骤为:
1)根据对系统性能指标的要求,确定希望闭环主导极点Sd的位置。
2)设计校正装置的超前部分Gc2(s)。设计时要兼顾到既使Gc2(s)在Sd处产生的相位超前角φc2满足Sd点的相角条件,又使Gc2(s)极点与零点的比值β足够大,以满足迟后部分使系统在Sd点的开环增益有较大幅度增大的需要。
3)根据所确定的β值,按迟后校正的设计方法去设计Gc1(s)。
4)画出校正后系统的根轨迹。由根轨迹的幅值条件,计算系统工作在Sd处的静态误差系数。如果所求的值小于给定值,则需增大β值,应从步骤2)开始重新设计。
下面以实例说明这种校正的具体步骤。
例6—9 校正前该系统的开环传递函数为![]()
要求校正后具有下列的性能指标:阻尼比 ![]() ;无阻尼自然频率
;无阻尼自然频率 ![]() ;静态速度误差系数
;静态速度误差系数 ![]() 。试设计一迟后—超前校正装置。
。试设计一迟后—超前校正装置。
解(1)根据给定的性能指标,求出希望的闭环主导极点为
![]()
(2)设计校正装置。超前部分![]() 在
在 ![]() 处应提供的超前角
处应提供的超前角
![]()
令![]() 的零点
的零点 ![]() ,以抵消原系统的一个开环极点。这样设计不仅使校正后系统的阶数降低,绘制根轨迹方便,而且一般易于实现希望闭环极点的主导作用。在图6-24所示的s平面上,以
,以抵消原系统的一个开环极点。这样设计不仅使校正后系统的阶数降低,绘制根轨迹方便,而且一般易于实现希望闭环极点的主导作用。在图6-24所示的s平面上,以 ![]() 点为顶点,点
点为顶点,点 ![]() 与-1点的连线为边,向左作角
与-1点的连线为边,向左作角 ![]() ,该角的另一边与负实轴的交点
,该角的另一边与负实轴的交点 ![]() ,这就是所求超前部分的极点。由此可见,
,这就是所求超前部分的极点。由此可见, ![]() ,
,![]() 。
。
(3)经过超前部分校正后,系统的传递函数为
![]()
据此,作出相应的根轨迹,如图6-24中的实线所示。根据根轨迹的幅值条件,求得系统工作在![]() 点时的增益
点时的增益 ![]() ,对应的静态速度误差系数为
,对应的静态速度误差系数为
![]()
显然,![]() 不能满足给定指标的要求,所要增大的倍数
不能满足给定指标的要求,所要增大的倍数 ![]() 应由迟后部分
应由迟后部分 ![]() 来提供。由此可见,上述确定的β=4能满足将静态速度误差系数提高3.35倍的要求。
来提供。由此可见,上述确定的β=4能满足将静态速度误差系数提高3.35倍的要求。
(4)设计校正装置的迟后部分![]() 。
。
由点 ![]() 向左作一条与线段
向左作一条与线段 ![]() 成
成 ![]() 角的直线,此直线与负实轴交于
角的直线,此直线与负实轴交于 ![]() ,这就是所求
,这就是所求 ![]() 的零点,它的极点
的零点,它的极点 ![]() 。于是求得迟后部分的传递数为
。于是求得迟后部分的传递数为
![]()







评论